Aéromodélisme RC
Techniques et conception

Le système de
radiocommande
Lien vers « Sauver un animal »
Auteur : Philippe Kauffmann
Version initiale : 16 août 2008
Dernière révision : 20 juin 2018
Photos : constructeur ou auteur, sauf mention contraire
N. B. : double-cliquer sur les images permet souvent d’obtenir une version agrandie.
Sommaire
Le manche et ses potentiomètres
Le servomoteur et son potentiomètre
Le signal de commande du manche au
palonnier
Modulation d’impulsions basse fréquence
Modulation haute fréquence
Démodulation
Emetteurs informatisés
Le pupitre de contrôle
Organisation des voies
Codage de la position des manches
La programmation
Démodulation
Décodage
Association à l’émetteur
La connectique
Architecture d’un récepteur
L’alimentation
de la radiocommande
Émetteur
Récepteur
Règlementation,
bandes de fréquence
Responsabilité,
sécurité des personnes
Pour piloter un
avion de tourisme, le pilote agit sur les gouvernes de son avion via le manche
de pilotage ; les deux étant reliés par un système mécanique de tringlerie.
Pour piloter un aéromodèle, le pilote agit aussi sur les gouvernes, mais à
travers un système beaucoup plus complexe baptisé radiocommande (anciennement
télécommande). A une extrémité se trouve l’émetteur avec ses manches −
versions miniatures de ceux des avions grandeur − et à l’autre des
servomoteurs − plus couramment appelés « servos » − reliés aux gouvernes. Entre les deux, la
tringlerie mécanique a été remplacée par de l’électronique, de l’informatique
et une onde électromagnétique.
La radiocommande est apparue dans le monde modéliste aux environs de la seconde guerre mondiale, mais n’a été significativement diffusée qu’au début des années 1960, bien après les débuts de l’aéromodélisme. Ces premières radiocommandes commerciales utilisaient parfois des tubes à vide et étaient toujours de type « tout ou rien », c'est-à-dire qu’il n’était pas possible de braquer partiellement les gouvernes. Cette période s’est arrêtée vers 1966 lorsque les radiocommandes proportionnelles proches de celles d’aujourd’hui sont apparues.
Après près de 40 ans de stagnation technologique des radios en ondes dites métriques (27 MHz, 35 MHz, 40/41 MHz, 72 MHz), on a assisté à partir d’environ 2006 à un nouveau bond en avant avec l’utilisation des micro-ondes (2,4 GHz) aussi appelées ondes centimétriques et de la télémétrie. On peut maintenant s’attendre à une nouvelle stagnation, avec une évolution lente faisant ressortir quelques standards du foisonnement actuel.
Tous les tenants et aboutissants de cette radiocommande sont présentés dans ce chapitre et approfondis dans les chapitres suivants.
La photo 1 montre une chaîne de radiocommande de base à 4 voies avec 4 servomoteurs (gaz, ailerons, profondeur et direction). On observe :
· l’émetteur qui reçoit les ordres des deux manches, les transforme en un signal électrique qui module une onde radio,
· l’accumulateur de réception qui fournit l’énergie à la partie embarquée,
· le récepteur qui transforme l’onde radio de l’émetteur en autant de signaux de commande individuels qu’il y a de voies,
· les quatre servomoteurs (traditionnellement appelés servos) qui reçoivent un ordre de position du récepteur et le traduisent en angle sur leur palonnier.
Lorsqu’aucun réglage particulier n’est effectué au niveau de l’émetteur (course, offset, exponentiel…), l’angle du palonnier correspond à peu près à l’angle du manche de commande. Le palonnier suit donc le manche et on est en présence de ce qu’on appelle en automatisme un arbre électrique, car tout se passe comme si le manche et le palonnier étaient reliés par un axe mécanique invisible.

Photo 1 : chaîne de radiocommande 4 voies pour aéromodèle à moteur à explosion (SANWA 1985)
La photo 2 montre une chaîne de radiocommande à 4 voies avec un émetteur programmable et un moteur de propulsion électrique avec trois servos (ailerons, profondeur et direction). On notera que l’émetteur comme le récepteur disposent de sept voies dans ce cas (les trois dernières voies étant inutilisées). Le système est très proche du système précédant et on observe :
· l’émetteur qui reçoit les ordres des deux manches, les transforme en un signal électrique qui module une onde radio,
· l’accumulateur de propulsion qui fournit l’énergie au contrôleur du moteur,
· le récepteur qui transforme l’onde radio de l’émetteur en autant de signaux individuels qu’il y a de voies,
· le contrôleur (ou variateur) qui contrôle la vitesse du moteur et fonction de l’ordre reçu,
· les trois servos qui reçoivent un ordre de position du récepteur et le traduisent en angle sur leur palonnier.
On remarque que dans cette variante il n’y a pas d’accumulateur de réception car le contrôleur du moteur (ESC pour electronic speed controller en anglais) possède - sauf exception - un BEC (Battery Eliminator Circuit) qui génère à partir de l’accumulateur de propulsion la tension électrique nécessaire au fonctionnement du récepteur et des servos.

Photo 2 : chaîne de radiocommande avec propulsion électrique (Graupner JR 2003)
Le manche et ses potentiomètres
Chaque manche est
relié mécaniquement (photo 3) à deux potentiomètres (un par direction).
Lorsqu’on déplace le manche on fait donc tourner l’axe de l’un ou des deux
potentiomètres. Les manches sont ramenés automatiquement au centre par des
ressorts de rappel, sauf pour la commande de gaz. Dans le cas de la commande de
gaz le ressort de rappel est remplacé par un crantage ou un système à friction
qui tend à préserver la position du manche.

Photo 3 : manche de commande 2 axes (partie arrière)
Un potentiomètre
(photo 4) est un circuit électrique destiné à transformer l’angle mécanique de
son axe de commande en un signal électrique, en l’occurrence une résistance
électrique. Le potentiomètre est constitué de :
·
une piste résistive fixe (typiquement en
carbone) en arc de cercle avec des connexions électriques à chaque extrémité,
·
un curseur relié mécaniquement à l’axe du
potentiomètre et électriquement aux balais du curseur.
La résistance entre l’extrémité gauche de la piste résistive et le
curseur est proportionnelle à la longueur de l’arc sous-tendu, donc fonction de
la position angulaire de l’axe du potentiomètre. Le potentiomètre fournit donc
la mesure électrique de la position angulaire du manche.

Photo 4 : potentiomètre (vue éclatée)
On notera que certaines radios utilisent maintenant des manches à capteurs à effet Hall (radios FrSKY notamment). Ce sont des capteurs à semi-conducteur qui donnent un signal fonction de la position d’un aimant mobile placé face à eux. L’intérêt de cette technologie est l’absence de frottement et donc d’usure.
Le servomoteur et son potentiomètre
Un servomoteur (voir
photo 5) est constitué de :
·
un potentiomètre semblable à celui des
manches,
·
un palonnier relié à l’axe du potentiomètre,
·
un moteur électrique qui entraîne l’axe du
potentiomètre via un réducteur,
·
une électronique de commande qui reçoit les
ordres du récepteur et actionne le moteur,
·
un boîtier qui maintient ensemble
toutes les pièces et permet la fixation à l’aéromodèle.
Le fonctionnement est le suivant : l’électronique mesure la
résistance du potentiomètre témoin de la position du palonnier. Si la
résistance est différente de celle correspondant au signal de commande reçu,
l’électronique active le moto-réducteur dans un sens ou l’autre jusqu’à ce que
la valeur de la résistance corresponde à celle demandée par le signal de
commande. Le potentiomètre du servo recopie donc la valeur de résistance du
potentiomètre de l’émetteur.
Il est essentiel de bien comprendre les tenants et aboutissants de ce
principe. Les potentiomètres sont le cœur de la radiocommande, quelle que soit
son type. L’ensemble ne pourra pas être meilleur que ces éléments et leurs
liaisons mécaniques aux manches et aux palonniers. S’il y a un jeu mécanique
entre manche et potentiomètre ou entre palonnier et potentiomètre, ce jeu
dégradera le fonctionnement de l’ensemble.
De plus, la précision ne pourra jamais être meilleure que celle des
potentiomètres. Or les potentiomètres sont loin d’être parfaits. Indépendamment
de la tolérance sur la résistance globale (environ 10 %) sans effet important,
les potentiomètres souffrent de non linéarité (typiquement 1 %). De plus, la
valeur de la résistance change légèrement avec la température, ce qui fait que
les neutres bougent quand la température change. Enfin, les potentiomètres
s’usent puisqu’il y a un frottement entre les balais du curseur et la piste
résistive. Un bon servo et un bon émetteur devront donc nécessairement disposer
de potentiomètres de qualité.
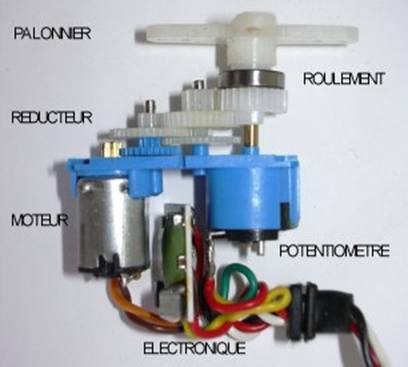
Photo 5 : servomoteur sans son boîtier
Le signal de commande du manche au palonnier
Modulation d’impulsion ou basse fréquence
(BF)
Les premières
radiocommandes transformaient la résistance de chaque voie en impulsion de
durée variable (en fonction de la valeur de la résistance), générée de façon
périodique environ cinquante fois par seconde
(voir figure 1). La position du neutre correspondait à 1,5 ms, tandis que les
valeurs extrèmes correspondant aux butées de manches étaient de 1 et 2 ms avec
l’intégration du débattement des trims.
N.
B. : au départ chaque fabricant utilisait des valeurs spécifiques
légèrement différentes de celles des autres fabricants. L’harmonisation s’est
faite au fur et à mesure des décennies.
.

Figure 1 : impulsion liée au potentiomètre de manche
aussi appelée modulation PWM
Les impulsions de chaque manche étaient ensuite combinées les unes à la suite des autres pour former un signal multiplexé (multiplexage temporel) portant les informations de position de l’ensemble des manches de la radiocommande (figure 2). L’impulsion de durée variable de chaque manche était transformée en une impulsion de durée fixe (environ 0,4 ms) suivie d’un repos de durée telle que le temps d’impulsion ajouté au temps de repos corresponde à la durée d’impulsion initiale (1 à 2 ms). Ce train d’impulsions appelé PPM est encore utilisé aujourd’hui dans certaines radiocommandes à ondes centimétriques (2,4 GHz), mais pas toutes.
Figure 2 : impulsions multiplexées des manches
On remarquera que si
on bouge un manche juste après la génération de l’impulsion correspondante, le
mouvement ne sera répercuté qu’à la période suivante, c'est-à-dire avec 20 à 25
ms de retard.
N. B. : La
période normale de répétition des signaux multiplexés n’a jamais été bien fixe,
car elle n’a pas d’effet direct sur les servos, sinon qu’ils doivent attendre
plus ou moins longtemps chaque ordre nouveau. Les radiocommandes modernes
utilisent en principe une période variant entre 18 et 22 ms, mais FUTABA s’est
fixé depuis longtemps aux environs de 15 ms ce qui pose des problèmes avec
certains servos et certaines radios dites rapides (SANWA SD-10G et SPEKTRUM DX7
SE notamment) utilisent une période inférieure ou égale à 10 ms, ce qui impose
des servos numériques capables de suivre ce rythme.
La transformation
des signaux électriques indépendants des manches en un train d’impulsions
unique appelé basse fréquence sert à moduler une onde électromagnétique (radio)
à haute fréquence (typiquement 2,4 GHz).
On parle donc d’un signal modulé BF (pour basse fréquence) qui module un
autre signal dit HF (pour haute fréquence). Le signal HF est une sinusoïde dont
une ou plusieurs des caractéristiques : amplitude, fréquence ou phase,
évolue au gré du signal BF modulant. Ce signal HF ainsi modulé est amplifié et
appliqué à l’antenne qui le rayonne sous forme d’onde électromagnétique.
On notera toutefois
que de nombreuses radios en 2,4 GHz n’utilisent plus le multiplexe de la figure
2 pour moduler l’onde radio, mais un multiplexe numérique propriétaire.
Modulation haute fréquence
Tout émetteur
possède une tête haute fréquence, parfois interchangeable et appelée alors en
général module HF. Cet élément possède un oscillateur électronique dont la
fréquence d’oscillation nominale est définie par la vibration mécanique d’une
lame de quartz. La fréquence d’oscillation électrique n’est pas nécessairement
la même que la fréquence de vibration du quartz car on peut multiplier et
diviser la fréquence du quartz par un entier. Dans les émetteurs dits à
synthèse de fréquence et onde centimétrique (2,4 GHz), on modifie par programme
les coefficients de division et de multiplication pour obtenir exactement la
fréquence désirée. La tête HF dispose d’une entrée de modulation pour appliquer
le signal BF, ce signal BF fait soit varier l’amplitude (émetteurs pour jouets
de très bas de gamme), soit la fréquence d’oscillation autour de la valeur
nominale, soit la phase de la sinusoïde dans le cas de certains émetteurs à 2,4
GHz.
Démodulation
L’onde modulée est
appliquée sur l’antenne de l’émetteur d’où elle rayonne dans tout l’espace et arrive
très atténuée sur l’antenne de réception. Le récepteur amplifie ce signal ténu
et le démodule pour retrouver le signal BF multiplexé. Après démultiplexage,
chaque prise de servo reçoit un signal démultiplexé identique à celui de
l’émetteur avant multiplexage comme celui de la figure 1. Chaque servo n’a plus
alors qu’à transformer la durée de chaque impulsion en position angulaire.
Emetteurs informatisés
Les étapes de codage
et décodage qui viennent d’être décrites sont celles des premières radiocommandes
proportionnelles. Avec l’informatisation (toutes les radios actuelles
fonctionnent grâce à un microcontrôleur, ordinateur sur une puce et sont donc
strictement un système informatique), certaines étapes ont parfois été masquées
ou modifiées, mais pas toujours. Souvent c’est la phase de transformation de la
position du manche de l’émetteur en impulsion qui a disparu. Parfois le train
d’impulsions PPM a été remplacé par un code plus sophistiqué, parfois sur une
durée plus courte, mais sans changer le fait qu’on transforme les positions de
manche en suite d’impulsions. De toute façon, en bout de chaîne, les servos ont
toujours besoin de l’impulsion périodique au format de la figure 1.
Le pupitre de contrôle
Le pupitre de
contrôle respecte toujours à peu près la même ergonomie visible à la photo 6.
On y retrouve :
·
Les deux
manches pour les quatre commandes principales : gaz, ailerons, profondeur
et direction.
·
Les
trims, indispensables pour corriger les défauts des zéros des manches et de certaines
voies secondaires.
·
L’afficheur,
qui fournit les informations sur
o
le
modèle sélectionné,
o
la
tension de batterie,
o
la
position des trims,
o
éventuellement
les mesures télémétriques.
Il affiche aussi ponctuellement les paramètres de programmation durant
la phase de programmation d’un modèle.
·
Les
boutons de programmation qui servent à
o
choisir
le modèle,
o
régler
les paramètres de chaque modèle,
o
affecter
les interrupteurs, potentiomètres et boutons,
o
contrôler
les temporisateurs.
·
Les interrupteurs,
boutons poussoirs et potentiomètres. Ils sont en partie affectés aux voies
secondaires (ici volets d’atterrissage, train rentrant et mode/gain gyroscope)
et à diverses commandes (ici le double débattement, les phases de vol et le
basculement moniteur/élève). Certains de ces interrupteurs, boutons poussoirs
et potentiomètres peuvent dans certains cas rester non affectés et donc sans
effet. Les affectations les plus courantes sont :
o
phases
de vol,
o
double
débattement (dual rate en anglais),
o
activation
manuelle de mixage,
o
basculement
moniteur/élève.

Photo 6 : organes de contrôle et d’information
Organisation des
voies
Sur un avion ou un planeur grandeur, les commandes sont toujours organisées de la même façon, ce qui permet à un pilote de passer d’un type à un autre sans problème. Cette standardisation a mis plusieurs décennies à être entérinée et s’est achevée à la fin des années 40. Au début de la seconde guerre mondiale, les pilotes français tiraient encore la poignée de gaz à eux pour accélérer. Les survivants de la bataille de France ont dû apprendre à la pousser pour accélérer lorsqu’on leur a confié des avions britanniques. Malheureusement en modélisme, on n’est pas encore parvenu à cette standardisation. Il est vrai que les enjeux ne sont pas les mêmes.
Il y a principalement deux écoles : celle qui adopte le mode 1, c'est-à-dire gaz et ailerons à droite et celle qui adopte le mode 2, c'est-à-dire profondeur et ailerons à droite, disposition plus proche de celle des avions grandeur (du moins à la place du copilote). Le mode 1 est le mode le plus répandu en France et en Europe alors que les US utilisent plus volontiers le mode 2 ; mais il y a de nombreuses exceptions des deux cotés de l’atlantique. Phil Kraft par exemple – américain champion du monde d’acrobatie en 1967 – célèbre pour sa marque de radios très réputée aux USA pilotait en mode 1.
Dans les clubs, la majorité des membres utilisent les modes 1 ou 2. Mais on peut aussi trouver quelques réfractaires qui préfèrent les ailerons à gauche des modes 3 ou 4 (voir figure 3). Bien sûr, il y a parfois quelque nostalgique des gaz en tirant, ce qui fait finalement huit variantes possibles en tout…

Figure 3 : les quatre modes principaux de répartition de commandes
sur les deux manches d’une radiocommande (notice MX16 Graupner)
Cette tour de Babel n’est pas simplement anecdotique, car sur de nombreux émetteurs on ne peut pas passer les gaz de gauche à droite ou inversement. De plus, même si on y arrivait en bricolant, ça ne servirait à rien car le soft de la radio doit absolument savoir quel manche agit sur quelle gouverne pour pouvoir effectuer correctement les mixages. Lorsqu’on achète une radio il faut donc impérativement savoir si elle est en mode 1 (gaz à droite) ou mode 2 (gaz à gauche), ou si elle supporte les deux modes.
Si on est débutant, il faut choisir le mode du moniteur à cause de la double commande. S’il n’y a pas de moniteur, il faut choisir le mode 1 car ça fera disparaître petit à petit les radios en mode 2 qui nous compliquent la vie.
Codage de la position des manches
La position des
manches est soit convertie en un signal PPM (figure 2), soit directement en
nombres binaire plus ou moins précis appelée trame ou multiplex numérique. Les premières radios PCM utilisaient un
codage sur 9 bits (position du manche définie sur 512 points) ce qui est
largement suffisant si on considère la non linéarité typique de 1 % des
potentiomètres et le fait qu’un crantage de gaz ne comporte qu’environ 40
points. Mais avec le temps on a augmenté la définition numérique de la position
avec 1024 puis 2048 points, pour arriver aujourd’hui parfois à la résolution
ridiculement élevée de 32758 points sur certaines radios. Il faut comprendre
que si augmenter la résolution de la position au-delà d’une certaine limite
n’apporte rien d’un point de vue précision du fonctionnement, ça n’a pas non
plus de coût d’un point de vue fabrication. Par contre, ça permet de mettre en
avant un argument commercial efficace au niveau des ventes bien que douteux du
point de vue de l’honnêteté.
Contrairement à ce
que l’on pourrait supposer, le signal PPM n’est pas l’apanage des anciennes
radios et la trame numérique celui des radios récentes. De nombreux modules HF
attendent un signal PPM en entrée, on le retrouve donc dans certaines radios
très récentes avec une conséquence négative : un temps de latence qui peut
atteindre 22 ms lié au fait que l’information n’est souvent rayonnée que
lorsque l’ensemble de la trame PPM est reçu par le module HF.
La programmation
La programmation
permet au minimum des sauvegarder les caractéristiques principales de plusieurs
modèles ; le nombre de modèles qu’il est possible de sauvegarder
augmentant avec le prix de la radiocommande (de 6 pour les modèles les plus économiques
à plusieurs dizaines pour les plus chères). Ce minimum se compose de :
·
réglage
du sens de débattement de chaque servo,
·
réglage
de l’amplitude du débattement de chaque servo,
·
mémorisation
de la position des trims,
·
réglage
de l’exponentiel sur les voies Ailerons et Profondeur.
En général on aura,
même sur les radiocommandes de base, quelques fonctions supplémentaires,
·
mixages
pour ailes delta, hélicoptères, empennages en V, plus quelques mixages libres,
·
double
débattement,
·
un
chronomètre.
Les radiocommandes
du milieu de gamme offrent bien souvent en plus :
·
plusieurs
phases de vols, permettant de sauvegarder les trims principaux de chaque phase,
·
des
courbes de gaz et de pas sur 5 points, spécifiques de chaque phase de vol pour
les hélicoptères,
·
des
mixages plus évolués (asymétriques, actionnables automatiquement, etc.),
·
plusieurs
chronomètres (radio, modèle, moteur, etc.),
·
la
permutation des voies.
La dernière
fonctionnalité, parfois absente en milieu de gamme, mérite quelques
commentaires. Chaque marque de radiocommande organise différemment ses quatre
voies principales, ce qui rend difficile le pilotage d’un aéromodèle par une
radiocommande de marque autre que celle prévue au départ, à moins qu’elle
dispose de la fonction de permutation des voies. L’organisation des voies −
indépendante du mode (1 à 4) choisi − pour les principales marques est
donnée par le tableau 1 ci-après :
|
|
Graupner/JR/SJ SPEKTRUM |
FUTABA HITEC |
Multiplex Robbe |
Sanwa (Airtronic) |
|
Voie
1 |
Gaz |
Ailerons |
Ailerons |
Profondeur |
|
Voie
2 |
Ailerons |
Profondeur |
Profondeur |
Ailerons |
|
Voie
3 |
Profondeur |
Gaz |
Direction |
Gaz |
|
Voie
4 |
Direction |
Direction |
Gaz |
Direction |
Tableau 1 : organisation des quatre voies principales selon
la marque de radiocommande
Avec les
radiocommandes haut de gamme, on disposera en général d’une programmation
encore plus complète :
·
plus de
fonctionnalités dans les phases de vol,
·
plus de
points de réglages des courbes gaz/pas en mode hélicoptère,
·
plus de
fonctionnalités secondaires,
·
et
surtout une programmation plus ergonomique.
Un bon choix de
radiocommande doit se faire en fonction des trois critères principaux suivants
(en ignorant le critère financier) :
·
le
besoin ou non de module HF interchangeable (fonction des récepteurs en stock
que l’on souhaite pouvoir utiliser avec la nouvelle radiocommande),
·
le
nombre de modèles que l’on veut mémoriser (fonction du nombre de modèles prévus
en stock…),
·
les
fonctions de programmation souhaitées en fonction des modèles à piloter.
Démodulation
Le récepteur assure
deux fonctions :
·
démodulation du signal radio pour récupérer le signal PPM
ou numérique de l’émetteur,
·
décodage du signal multiplexé PPM ou numérique pour régénérer les impulsions
individuelles en modulation de largeur d’impulsion pour les servos.
La première fonction
est toujours assurée de façon analogique et introduit un faible retard de
l’ordre de 0,2 ms.
Attention néanmoins avec les anciennes radios
à ondes métriques (41 MHz ou
72 MHz) : dans l’émetteur la
modulation peut être positive ou négative selon la marque. Les récepteurs
conçus pour une modulation positive ne fonctionnent pas avec les émetteurs à
modulation négative et réciproquement. Heureusement, les récepteurs
génériques : Webra, Simprop, Schulze, JETI, ACT, Berg, MZK, Hyperion,
Xpower, Feeltronic, Modell-Expert, etc., contrairement à de nombreux récepteurs
de marque, sont conçus pour supporter indifféremment les deux types de
modulation.
N. B. : le type de modulation ne concerne pas les
récepteurs en 2,4 GHz car chaque marque utilise son propre standard, toujours
incompatible avec tous les autres. Par ailleurs, on ne trouve pas encore en
2018 de récepteur générique en 2,4 GHz, hormis des récepteurs au standard
SPEKTRUM DSM2 et FUTABA FASST.
Décodage
Le décodage du
signal PPM multiplexé peut être réalisé de façon instantanée avec des portes
logiques (registres à décalage), mais au prix de l’absence de protection contre
les parasites qui se traduisent par des tops radios parfois violents. La raison
est simple, si un parasite apparaît, il coupe une impulsion en deux et elle est
vue alors comme deux impulsions courtes, ce qui envoie deux servos en butée. Ce
problème a, durant de nombreuses années, poussé des modélistes à adopter des
radios haut de gamme utilisant un codage numérique des données appelé PCM (pour
Pulse Code Modulation) protégé contre ce problème. Mais le décodage du
signal PPM des derniers récepteurs métriques était le plus souvent
« filtré » par un microcontrôleur qui élimine les parasites au prix
d’un délai de 2 ms à 25 ms selon le programme utilisé. Ces récepteurs ont donc
fait perdre son intérêt au PCM qui nécessite un délai plus important de
traitement compris environ entre 10 ms et 32 ms selon de type de codage.
Avec la technologie
centimétrique, le codage et donc le décodage sont toujours numériques avec
filtrage des parasites. La trame PPM est alors souvent remplacée par une trame
numérique plus complète que la trame numérique PCM.
Le décodage
« intelligent » ou numérique a induit deux modes dégradés de
fonctionnement des récepteurs :
·
le mode
« hold » qui maintient les ordres antérieurs en cas d’apparition de
signaux non corrigibles durant un temps bref,
·
le mode
« fail safe » qui met toutes les commandes au neutre excepté les gaz
placés à une valeur au choix en cas d’absence prolongée de signal valide.
Tous les récepteurs
ne disposent pas des deux modes, et le réglage des gaz du mode « fail
safe » n’est pas toujours programmable.
Association à l’émetteur
Voler à plusieurs
impose un système d’association entre chaque émetteur et récepteur. Ceci a
conduit en bande métrique à subdiviser chaque bande en canaux (de 10 kHz
jusqu’à 41 MHz inclus et 20 kHz au delà). La solution initiale pour
sélectionner un canal consistait alors à enficher un quartz d’émission sur le
canal choisi dans l’émetteur, et le quartz correspondant dans le récepteur.
Mais attention, le quartz d’émission n’est pas sur la même fréquence que le
quartz de réception. Le quartz de réception est décalé de 455 kHz sur un
récepteur à simple changement de fréquence et de 10,7 MHz pour un récepteur à double
changement de fréquence.
Par exemple, si on
choisit 41,050 MHz (fréquence autorisée jusqu’au 31/12/2010) on prendra un
quartz TX du canal C405 pour une radio JR et un quartz RX C405 pour le
récepteur en ayant pris soin de vérifier que quartz et récepteur sont
compatibles (simple ou double changement de fréquence). La taille des quartz
est standard, la même en émission et réception, sauf pour quelques récepteurs
qui utilisent des quartz miniatures pour gagner du poids. Lorsqu’on installe un
quartz de réception il faut donc faire attention à deux paramètres :
taille miniature ou standard, simple ou double changement de fréquence.
Cette première
méthode d’association un peu laborieuse est devenue de moins et moins populaire
avec le temps, d’autant plus que les changements de quartz à répétition
finissaient par induire des faux contacts électriques. Les émetteurs sont donc
devenus de plus en plus souvent à synthèse de fréquence, ce qui permet de
choisir le canal d’émission par programme à la mise sous tension. Les
récepteurs ont suivi la même voie en incorporant bien souvent un scanner qui
parcoure les canaux lorsqu’on presse sur le bouton « scan » et allume
une led lorsque le récepteur a trouvé l’émetteur et s’est définitivement calé
sur lui (voir photo 7). On notera que Francis Thobois [1] a proposé des
radios à monter soi-même à synthèse de fréquence 10 ans avant tout le monde,
mais qu’il y a ajouté l’évasion de fréquence apparue seulement en 2006 chez
SPEKTRUM avec le DSM2 en 2,4 GHz.

Photo 7 : bouton et led d’association d’un récepteur
métrique
Les récepteurs à
micro-ondes n’utilisent pas de canal prédéterminé, mais un identificateur (ID
en anglais) qui est un nombre binaire unique qui joue le même rôle.
L’association consiste donc dans ce cas à échanger ce nombre entre l’émetteur
et le récepteur lorsqu’on active la fonction « binding » entre les
deux ; en général en pressant sur un bouton spécifique sur l’émetteur et
en branchant une petite prise ou en appuyant sur un bouton sur le récepteur. La
différence par rapport à la bande métrique est qu’il faut en général déclencher
la procédure aussi bien sur l’émetteur que sur le récepteur, car sinon
l’émetteur refuse d’accepter un récepteur avec un identificateur différent de
celui avec lequel il était lié précédemment, tout comme le récepteur refuse de
changer d’identificateur.
La connectique

Photo 8 : connecteurs de batterie et servos d’un
récepteur (standard UNI)
Aujourd’hui les récepteurs utilisent une connectique presque standardisée, et les anciens connecteurs ROBBE, MULTIPLEX et SANWA ont pratiquement disparu. Les connecteurs pour les servos sont identiques au connecteur d’alimentation. Ils utilisent dans les deux cas trois broches alignées au pas de 2,54 mm dans l’ordre suivant :
· masse
· +
· impulsion
Dans le cas du connecteur d’alimentation, la broche d’impulsion est inutilisée ou fournit dans certains cas un signal multiplexé PPM.
Il subsiste toutefois un problème. Tous les fabricants ont fini par adopter un corps de connecteur en plastique conforme aux connecteurs JR souvent appelé connecteur UNI (photo 9) avec deux chanfreins de détrompage, sauf FUTABA qui a maintenu son connecteur avec un ergot supplémentaire (photo 10). Graupner/SJ (photo 8) qui a repris le standard JR et FUTABA proposent évidemment des récepteurs compatibles avec leurs prises de servo. Quelques fabricants comme Multiplex ont choisi un détrompage double compatible avec les deux standards, mais malheureusement, la plupart des autres fabricants ont résolu le problème en supprimant tout détrompage… Gare aux branchements à l’envers qui ne sont pas toujours sans conséquence !
En raison de l’universalité des prises JR, tous les fabricants de servos, hormis FUTABA, les ont adoptées. On peut brancher une prise JR dans un récepteur FUTABA, mais sans profiter du détrompage. Par contre, si on veut utiliser des servos FUTABA sur un récepteur pour prise JR, il faut un coup de pince coupante bien placé suivi de quelques passages d’une lime fine pour transformer la prise FUTABA en une prise UNI.


Photo 9 : connecteurs JR/SJ et UNI Photo 10 :
connecteurs FUTABA
N. B. : Il existe une exception à la connectique présentée. En effet, FUTABA a décidé de proposer des récepteurs dans leur gamme centimétrique FASST avec un connecteur à trois broches spécifique destiné à sa trame multiplexée numérique S-BUS. La charge du démultiplexage revient alors à des modules d’extension ou aux servos eux-mêmes. Ceci complique un peu le système mais permet de diminuer le nombre de fils sur les modèles complexes. La contrepartie est la diminution de la fiabilité car un mauvais contact sur le bus affecte tous les servos en aval. SPEKTRUM utilise aussi une trame multiplexée dans ces récepteurs secondaires, mais seuls quelques modules « flybarless » pour hélicoptères savent en tirer profit.
Architecture d’un récepteur
Il n’est pas
question d’expliquer ici l’architecture détaillée des récepteurs, car elle est
complètement décrite sur le site internet de Francis Thobois [2] ;
mais simplement de survoler quelques caractéristiques principales pour pouvoir
distinguer les récepteurs entre eux. Les photos 11 à 15 ci-après présentent
deux récepteurs métriques à synthèse de fréquence : un récepteur compact 6
voies SIMPRPOP sur un circuit imprimé unique, un récepteur MULTIPLEX à 8 voies
de taille standard sur deux circuits imprimés superposés et un récepteur
centimétrique TURNIGY à 8 voies (photo 16) posé sur une seule face de circuit
imprimé.
Dans tous les cas la
partie HF est séparée de la partie BF. Elle est sur la moitié gauche du
récepteur SIMPROP et sur le circuit imprimé de la photo 15 pour le récepteur
MULTIPLEX. Dans le cas du récepteur SIMPROP, la partie HF est constituée du
circuit intégré spécialisé MC3372 (en haut à gauche de la photo 11) et de
filtres céramique (les deux rectangles gris en haut et à gauche de la photo
12). Dans le cas du récepteur Multiplex, la partie HF est constituée de
composants discrets (transistors individuels) est de filtres à noyau plongeant
(les trois cubes avec noyau central fileté réglable par rotation). Comme les
filtres à noyau doivent être réglés, ils disposent d’une entaille pour
l’insertion d’un tournevis, mais il ne faut en aucun cas y toucher car le
réglage n’est possible qu’avec des outils spécialisés. Un réglage « au
pif » fonctionnera peut-être sur une fréquence, mais pas sur l’ensemble de
la bande.
Les deux premiers
récepteurs utilisent pour le choix du canal de réception un circuit PLL et un
diviseur programmable (les deux petits circuits intégrés rectangulaires de la
photo 12, non visibles dans le cas du récepteur MULTIPLEX) pilotés par un
quartz (rectangle métallique brillant marqué 8.000 sur la photo 12 et non
lisible sur la photo 15). Contrairement donc à ce que pensent certains, même un
récepteur de synthèse à besoin d’un quartz, mais il n’est pas interchangeable.
La partie BF se
résume à un microcontrôleur pour le décodage « intelligent », nommé
IPD pour Intelligent Pulse Decoding dans le cas du récepteur MULTIPLEX (photo
14). Ce composant est le gros circuit intégré à droite de la photo 12 et
le gros circuit intégré à 28 broches de la photo 16 cadencé par l’oscillateur
situé à sa gauche (rectangle métallique). Dans les deux cas, le microcontrôleur
est relié aux connecteurs des servos via des résistances de protection contre
les inversions (petits rectangles noirs). Si le décodage avait été fait par un
circuit logique, on aurait vu à la place du microcontrôleur un circuit intégré
marqué MC4015 (ou CD4015 ou HEF4015…) d’aspect semblable au circuit intégré
marqué MC3372 de la photo 12.
Pour se protéger des
perturbations d’alimentation venant des pointes de courant dans les servos, le
récepteur SIMPROP utilise un condensateur (rectangle jaune à bande rouge marqué
« 22µ 10V » à droite de la photo 13), qui est un réservoir tampon
d’électricité ; tandis que le récepteur MULTIPLEX dispose d’un circuit
plus évolué : un régulateur 3,3V (petit circuit intégré entre les deux
condensateurs noirs à bande blanche en haut de la photo 16). La disposition MULTPLEX
permet une meilleure immunité aux perturbations d’alimentation, mais rend les
servos plus sensibles aux parasites, car ils ne reçoivent plus que des
impulsions de 3,3 V au lieu de 4,8 V.


Photo 11 : récepteur à synthèse SIMPROP, face CI Photo 12 : récepteur à synthèse
SIMPROP, face passifs



Photo
13 : récepteur
IPD Multiplex, boîtier Photo 14 : récepteur IPD Multiplex,
face HF Photo 15 : récepteur IPD Multiplex, face BF
Les récepteurs
centimétriques reprennent les mêmes principes que les récepteurs métriques
(photo 28), mais les filtres céramiques ou à noyau plongeant ne sont plus
nécessaires, pas plus que la PLL ou le diviseur de fréquence, tout étant
intégré dans le circuit intégré haute fréquence. Ils sont donc plus compacts et
légers, et surtout beaucoup moins chers à produire. Les prix élevés des
récepteurs centimétriques ne sont que la conséquence d’une politique
commerciale. Leur prix de vente normal devrait se situer nettement en-dessous
de 20 € (en 2018), ce qui est déjà le cas pour des récepteurs
« compatibles » d’origine asiatique.

Photo 16 : récepteur 2,4 GHz à 8 voies Turnigy
Le quartz en boîtier
métallique est toujours bien visible dans le récepteur centimétrique. Le
microcontrôleur toujours présent est le composant rectangulaire à gauche relié
aux broches du connecteur via des résistances de protection. La partie HF se
résume au circuit carré à droite du microcontrôleur. Le régulateur de tension 3,3 V semblable à
celui du récepteur MULTPLEX est visible en bas à droite entre les deux
condensateurs.
N.B. : la majorité des fabricants ont opté pour un
circuit intégré haute fréquence standard comportant un microcontrôleur capable
de traiter le signal multiplexé, mais incapable de le démultiplexer faute d’un
nombre de broches suffisant, ce qui
impose un second microcontrôleur pour le démultiplexage. Toutefois,
certains fabricants sont allés plus loin en faisant fondre des circuits
intégrés avec un nombre de broches plus grands, ce qui a permis d’éliminer le
microcontrôleur BF.
De plus, pour
pallier à la faiblesse du signal reçu en bande centimétrique, les récepteurs
utilisent souvent deux antennes, voire un récepteur satellite pour avoir une
redondance à quatre antennes (solution SPEKTRUM notamment) ; le module BF
choisissant le signal de l’antenne donnant le meilleur signal. Cette
technologie s’appelle en anglais « smart antenna » ou « antenna
diversity ». Il existe un faux débat sur internet concernant la différence
entre avoir deux antennes et un récepteur et deux récepteurs complets. Le débat
est un faux débat car il y a toujours autant de parties HF que d’antennes et
une seule partie BF qui choisit le meilleur signal. Il est impossible de
commuter plusieurs antennes sur une seule partie HF à tour de rôle, car on ne
pourrait pas savoir laquelle fournit le meilleur signal dans la mesure où on
n’a aucune information sur la qualité du signal d’une antenne déconnectée. Les
différences se situent uniquement au niveau des circuits intégrés qui
incorporent ou non plusieurs modules de réception HF dans un même boîtier, ce
qui change le nombre de composants sans influer sur les caractéristiques de
fonctionnement.
L’alimentation de la radiocommande
Emetteur
L’alimentation de
l’émetteur varie d’une marque et d’un modèle à l’autre, mais on peut dégager
deux cas principaux.
·
L’émetteur
est fourni avec un support pour des piles (typiquement de taille AA). Il faut
alors remplacer le support de piles pack un pack accumulateur adaptable ou
qu’on adapte soi-même, car les piles s’usent très vite et que ça devient
rapidement très onéreux, et surtout parce que les supports de piles sont sujets
à des mauvais contacts, et d’une fiabilité insuffisante.
·
L’émetteur
est fourni avec un pack d’accus, typiquement de 4,8 V, 7,2 V ou 9,6 V (4, 6 ou
8 éléments NiMh), parfois d’accumulateurs LiPo.
Récepteur
Lorsque le récepteur
n’est pas alimenté directement par le contrôleur du moteur électrique de
propulsion via son circuit « Battery
Eliminator Circuit » généralement appelé BEC (moteur à explosion, planeur
pur, ou contrôleur optocouplé), il faut l’alimenter via des accumulateurs.
L’alimentation se fait classiquement via 4 éléments NiMh. Quatre éléments de
taille AAA (masse 50 g) vont bien pour les modèles de moins de 2 kg. Entre 2 kg
et 4 kg, des éléments AA (masse 100 g) sont indispensables pour tenir compte de
la consommation supérieure des servos. Au-delà de 4 kg il faudra prendre des
éléments sub C (masse 300 g) ou même plus gros selon la taille du modèle.
Dans le cas où on
n’alimente pas l’électronique de réception via un circuit BEC, il convient
d’ajouter un interrupteur entre l’accumulateur et le récepteur, de façon à
pouvoir éteindre et allumer à volonté sans avoir à ouvrir le modèle et
débrancher l’accumulateur. Dans le cas de l’utilisation d’un circuit BEC cette
précaution est inutile car l’accumulateur de propulsion est en principe à plat
au moment de l’atterrissage et il faut de toute façon le débrancher pour le recharger.
Règlementation,
bandes de fréquence
Tout le monde sait que la France est un petit pays qui compte moins de 1% de la population mondiale mais ne fait jamais rien comme les autres.
Dans le domaine métrique, la France était le seul pays au monde à autoriser
la bande 41 MHz, mais autorise depuis 2011 aussi quelques canaux en 35 MHz et
40 MHz (bandes utilisées dans le reste de l’Europe). En contrepartie on nous a
enlevé quelques canaux en 41 MHz depuis le 31/12/2010, ce qui oblige à se
mettre dans l’illégalité ou de jeter quelques quartz à la poubelle si on
utilise encore un système radio en bande métrique. Bien qu’on ne vende plus
d’émetteur en bande métrique, ces bandes seront probablement encore utilisées
longtemps par ceux qui ne voient pas la nécessité de changer d’équipement tant
qu’il fonctionne. Or un équipement électronique peut durer très longtemps (cas
de la radio SANWA de 1985 et la SUPERTEF96 de l’auteur).
Dans le domaine centimétrique, la bande 2,4 GHz va de 2400 MHz à 2483,5 MHz dans le monde entier, sauf en France, sans raison compréhensible. En France (mais seulement en dehors des habitations) la bande est limitée à la plage 2400 MHz à 2453 MHz à la pleine puissance de 100 mW indispensable à notre hobby. Comme il y a une certaine confusion sur les fréquences autorisées, il faut faire très attention. Certains appareils ont un réglage "France/rest of world", d'autres sont strictement pour le marché français, d'autres encore utilisent la bande internationale et ne respectent pas la réglementation française. A vous de prendre vos précautions et responsabilités lors de l'achat et la mise en route de votre radiocommande.
Les radios actuelles sont assez fiables. Toutefois, comme tout matériel électronique, elles vieillissent mal à cause des différences de coefficient de dilatation des divers matériaux constituant qui finissent par provoquer la rupture des soudures des composants ; phénomène qui s’est accentué avec l’abandon récent de l’utilisation du plomb dans les alliages de soudure. De plus, l’humidité les fait vieillir prématurément par oxydation des contacts électriques et des résistances des potentiomètres.
Une bonne disposition est de nettoyer tous les contacts électriques accessibles à chaque début de saison et surtout d’éviter de stocker le matériel (émetteur comme modèles) l’hiver dans un endroit non chauffé (cave, garage ou grenier) intrinsèquement humide en hiver.
Les accumulateurs sont un cas à part. Ils vieillissent très vite. Les NiCd peuvent parfois durer dix ans, mais il vaut mieux les changer tous les 5 ans. Les NiMh sont moins durables et un remplacement tous les cinq ans est aussi recommandé. Quant aux LiPo, leur durée de vie ne dépasse le plus souvent guère deux ans (bien qu’une durée de vie de 5 ans ait déjà été observée). Le mieux est de les remplacer tous les deux ans au moins. Si le matériel qui utilise les accumulateurs a une grande valeur (maquette, grand modèle), un remplacement annuel peut être judicieux.
Responsabilité,
sécurité des personnes
Les radiocommandes
utilisent un moyen de communication intrinsèquement non fiable. Les pilotes,
même chevronnés, ne sont pas fiables 100 % du temps non plus. Il en résulte un
risque pour les modèles bien connu de tous, ainsi qu’un risque pour les personnes,
moins bien appréhendé mais beaucoup plus préoccupant car il y a déjà eu (très
rarement il est vrai) des accidents mortels. Etant responsable civilement et ne
pouvant s’abstraire de l’impondérable, tout modéliste a donc, en plus de
l’obligation d’être prudent, l’obligation d’être assuré pour le cas où la
prudence n’aurait pas suffi.
Ce rappel est
justifié par le fait que certains modélistes ignorent que de nombreuses
assurances civiles excluent les risques liés au modélisme. A chacun de vérifier
qu’il est assuré d’une façon ou d’une autre.
1. Site internet de Francis Thobois : page d’accueil
2. Site internet de Francis Thobois : théorie de la radiocommande