Aéromodélisme RC
Techniques et conception

La propulsion
Philippe Kauffmann, club des 5A Pardines (Auvergne)
Version initiale : avril 2006
Dernière révision : juin 2010
Photos : constructeur ou auteur, sauf mention contraire
Page internet : http://techniquemodelisme.free.fr/
N. B. : double-cliquer sur les images permet souvent d’obtenir une version agrandie.

Photo 1 : Propulsion maquette du fabriquant Seidel [1]
Sommaire
Courbe de traction caractéristique,
effet du pas
Choix du régime de rotation
Choix du diamètre et du nombre de
pales
Choix du pas
Estimation du rendement
La
propulsion par moteur à explosion
Principe de fonctionnement et
comportement général
Les cycles moteur
Cycle quatre temps
Cycle deux temps
Les éléments du moteur à explosion
Caractéristiques de couple et de
puissance
Types d’allumage et bougies
Concepts et options
Les bougies
Dispositifs de
préchauffage et annexes
Les carburants
Moteurs à bougies à
incandescence
Moteurs à bougies à
étincelles
Moteurs à autoallumage
La carburation et les réglages
L’échappement
Démarrage et sécurité
Rodage
Le démontage et l’entretien
Choix du moteur
Les moteurs de collection et hors
norme
Adaptation à l’hélice et au modèle
Bilan de masse
Principe de fonctionnement et
comportement d’une turbine à gaz
Architecture du système
Matériel disponible
Adaptation au modèle et précautions
Architecture d’un système de
propulsion électrique
Fondement physique
Structure et fonctionnement du
moteur électrique idéal
Les imperfections du moteur
électrique réel
Les divers types de moteur
électrique
A courant continu
Sans balai à rotor
interne
Sans balai à rotor en
cloche
Les moteurs sans noyau
tournant
Caractéristiques
générales des accumulateurs
Caractéristiques électriques générales
La résistance interne
Charge et décharge
Stockage et entretien
Sécurité
Dimensionner un
accumulateur
Les accumulateurs au
plomb
Caractéristiques
principales
Charge et
décharge
Stockage et
entretien
Précautions
Les accumulateurs
Cadmium/Nickel
Caractéristiques
principales
Charge et
décharge
Stockage et
entretien
Précautions
Les accumulateurs
Nickel/Métal hydride
Caractéristiques
principales
Charge et
décharge
Stockage et
entretien
Précautions
Un élément de
plus pour la route
Accumulateurs Lithium
Ion et variantes
Caractéristiques
principales
Charge et
décharge
Stockage et
entretien
Précautions
Spécificités
des LiIo
Spécificités
des LiPo
Spécificités
des LiFe
Point important sur les
accumulateurs
Les chargeurs
Les fonctions des
chargeurs
Les divers types de
chargeurs
Les accessoires
Les variateurs et contrôleurs
Variateurs pour moteurs
à balais
Contrôleurs pour moteurs
sans balai (brushless)
Le circuit BEC
Caractérisation du système de
propulsion électrique
Adaptation à l’hélice
Bilan de masse
Les aéromodèles multi-moteurs
Pour qu’un avion ou un aéromodèle puisse voler, à moins de profiter comme les planeurs des courants aériens, il lui faut un système de propulsion. Ce système peut se décomposer en quatre parties :
• L’hélice ou la turbine (qui est ni plus ni moins qu’une hélice carénée) qui est l’interface entre le moteur et l’air dans lequel le modèle vole. Elle fournit la force de traction Ft nécessaire au vol.
• Le moteur qui peut être électrique, à explosion (moteur à piston, maquette comme à la photo 1 ou non) ou une turbine à gaz. Il fournit la puissance Pt nécessaire à l’hélice afin qu’elle transforme puissance en force de traction Ft.
• Le contrôleur de puissance qui permet de régler la puissance fournie par le moteur. Il s’agit soit du servomoteur de gaz dans le cas des moteurs à explosion, soit du contrôleur électronique dans le cas des moteurs électriques.
• La source d’énergie. C’est le carburant dans le cas du moteur à explosion ou de la turbine à gaz. Ce sont les accumulateurs dans le cas des moteurs électriques. Comme dans ce cas il s’agit d’une source d’énergie secondaire (qui tire son énergie d’une autre source d’énergie), il faut aussi inclure le chargeur de batterie dans le système de propulsion, même si ce dernier n’est pas embarqué.
Le besoin de
traction
La force de traction Ft (voir équation 1) sert à compenser les trois forces qui s’opposent à l’avancement de l’aéromodèle :
• la traînée aérodynamique Fx, égale à la composante perpendiculaire à la direction d’avancement du poids du modèle (masse m multipliée par la gravité terrestre g et le cosinus de l’angle de montée α) divisée par la finesse aérodynamique f du modèle dans la situation considérée.
• La force Fm qui s’oppose à la montée de l’aéromodèle. La force Fm est égale au poids m.g multiplié par le sinus de l’angle de montée α.
• La force Fa, conséquence de l’accélération de l’aéromodèle. La force Fa est égale à la masse m multipliée par l’accélération γ.
Traction = traînée + gravité + accélération (1)
On peut en déduire l’équation (2) détaillée ci-après :
Ft = Fx + Fm + Fa = m.g.cosα/f + m.g.sinα + m.γ (2)
Les équations 1 et 2 permettent de déduire qu’il faut fournir une force de traction pour compenser la traînée aérodynamique, mais aussi une force supplémentaire si on veut monter ou accélérer. Ces deux dernières forces ne doivent toutefois pas être considérées de la même façon que la traînée, car il s’agit d’un stockage d’énergie potentielle ou cinétique, énergie récupérée à chaque descente et chaque ralentissement. Ces composantes sont dites conservatives car elles peuvent être aussi bien positives que négatives, et sur un vol complet, la moyenne de Fm comme de Fa est nulle puisqu’on est en principe à la même vitesse (nulle) et altitude à la fin qu’au début de chaque vol.
Par exemple : notre « mini F3A » de référence de 2 kg (voir chapitre « domaine de vol ») lors d’une montée à 69 km/h avec une finesse f de 5,6 (voir feuille de calcul) selon une pente α de 60° accélérant légèrement de 1 m/s/s aura besoin d’une force de traction de :
Ft = 2x9,81x0,5/5,6 + 2x9,81x0,87 + 2x1 = 1,75 + 17 + 2 = 20,75 Newton, soit 2,1 kg
Cet exemple met en évidence comme ça a déjà été montré dans le chapitre « domaine de vol » que c’est avant tout pour monter qu’il faut tirer. C’est donc le taux de montée désiré qui va déterminer le dimensionnement du système de motorisation. Une maquette avec une pente de montée réaliste de 10 % se contentera d’une motorisation beaucoup plus modeste qu’un modèle de 3D qui doit pouvoir monter verticalement.
Accessoirement, la motorisation sert aussi à freiner dans les descentes. Toutefois, les hélices repliables sont incapables de remplir cette fonction et on aura la même situation avec les contrôleurs dont le frein électronique est débrayé. On sera alors parfois conduit dans ces deux cas, comme sur les planeurs et les avions à réaction, à utiliser des aérofreins.
L’hélice transmet la puissance du moteur à la masse d’air. Une vision simpliste, mais acceptable en première approximation, consiste à considérer que l’hélice se visse dans la masse d’air. Une analyse un peu plus fine montre que l’hélice, si elle se visse, accélère aussi la masse d’air environnante chassée vers l’arrière. La vitesse de l’air en aval de l’hélice est donc supérieure à la vitesse d’avancement de l’aéromodèle.
Froude a étudié ce phénomène pour les hélices de bateau et montré que la force de traction obtenue est proportionnelle à l’augmentation de vitesse ΔV de la masse de fluide, c'est-à-dire que sans augmentation de la vitesse du fluide (air ou eau) il n’y a pas de traction. La figure 1(obtenue avec Javaprop [2]) montre ce qui se passe. Sur cette figure, l’hélice est placée au centre et l’air est soufflé vers la droite de la figure. La couleur représente la vitesse de l’air en un point donné. La couleur bleue représente de l’air non accéléré, et plus on tend vers le jaune, plus l’air est accéléré. Loin en amont (extrème gauche), la vitesse de l’air par rapport au modèle est Vo (vitesse du modèle). Plus on s’approche de l’hélice, plus la masse d’air est accélérée ; l’augmentation de vitesse atteignant ΔV au niveau de l’hélice.
Au niveau de l’hélice, l’air concerné est bien sûr celui passant à travers le disque de l’hélice de section S = π.D2/4. Toutefois en amont, comme le montre la figure 1, la section concernée est plus élevée, car pour un débit donné constant, la section doit être d’autant plus importante que la vitesse est faible. En aval de l’hélice, l’air, paradoxalement, continue à s’accélérer jusqu’à une augmentation de vitesse finale de 2.ΔV, et la section d’air impliquée continue à diminuer avec l’augmentation de la vitesse de l’air.
Figure 1 : vitesse de l’air accéléré par une hélice
La force de traction Ft théorique ainsi fournie est donnée par l’équation de Froude (équation 3) en fonction de la densité ρ du fluide. C’est la formule de l’hélice parfaite qui a toujours un rendement de Froude η inférieur à 1, rendement donné par l’équation 4. Le rendement est inférieur à 1 car l’hélice fournit une puissance Pt = Ft.(V + ΔV) alors que le modèle ne récupère que la puissance utile Pt = Ft.V. Une hélice réelle qui a des pertes aérodynamiques pourra tendre vers ce rendement η sans jamais l’atteindre.
 (3)
(3)
(4)
Dans la pratique, avec les modèles réduits comme avec les avions de tourisme, l’accélération de la masse d’air reste très faible (de l’ordre de quelques pourcents) ; on dit alors que l’hélice est peu chargée. Dans le cas des turbines, la charge est beaucoup plus forte et il n’est pas exceptionnel dans ce cas de doubler la vitesse de la masse d’air, ce qui conduit inévitablement à des rendements de propulsion médiocres. Dans le cas des turbines à gaz où la vitesse d’éjection est le plus souvent supersonique (de l’ordre de Mach 1,4 à plein régime), s’ajoutent en plus les effets de la compressibilité de l’air.
Courbe de traction caractéristique, effet du pas

Figure 2 : courbes caractéristiques d’une hélice bipale 11"x5,5"

Figure 3 : courbes
caractéristiques d’une hélice bipale 11"x7"

Figure 4 : courbes caractéristiques d’une hélice bipale 11"x10"
Les systèmes de propulsion à hélice ou turbine ont un rendement limité par quatre pertes de nature différente qui s’additionnent :
• la perte par accélération du flux d’air que l’on vient de voir déterminée par le rendement de Froude,
• la perte par friction de l’air sur la surface des pales, analogue à la traînée des ailes,
• la perte par tourbillon marginal correspondant strictement à la traînée induite d’une aile,
• la perte par déviation du flux d’air, résultant du fait qu’en arrière de l’hélice, l’air ne s’écoule pas en ligne droite, mais en spirale ; l’énergie supplémentaire non propulsive conférée ainsi à la masse d’air se traduisant par une perte supplémentaire.
En fin de compte, l’hélice se comporte un peu comme une aile avec une zone limitée de régime à bon rendement, et des rendements allant en diminuant lorsqu’on s’éloigne de cette zone optimale comme le montrent les figures 2, 3 et 4 obtenues avec logiciel libre de simulation d’hélices JavaProp [2] de Martin Hepperle.
La figure 3 montre sous forme réduite ce qu’on peut attendre d’une hélice standard. L’expression « forme réduite » correspond au fait que plutôt que d’utiliser directement la vitesse V du modèle, la force de traction Ft générée par l’hélice et la puissance Pt fournie à l’hélice, on utilise leur variante sans dimension : respectivement l’avance Av, le coefficient de traction Ct et le coefficient de puissance Cp définis par les équations 5, 6 et 7 :
![]() (5)
(5)
![]() (6)
(6)
![]() (7)
(7)
L’avantage de la forme réduite, c’est que pour des hélices de forme semblable on obtiendra des résultats indépendants du diamètre D en mètres, du régime de rotation N en tours/seconde, et de la masse volumique ρ de l’air en kg/m3.
Par exemple : les courbes d’une hélice « nylon grise standard Graupner » (photo 2 haut) sont en principe valables pour toutes les hélices de la série pour peu que le pas relatif (Pas P divisé par le diamètre D) ne change pas trop, ce qui est bien commode pour faire son choix. L’élément qui influe le plus sur les courbes réduites est le pas relatif P/D, d’où les familles de courbes 2, 3 et 4 : la première étant représentative des hélices à faible pas relatif, la seconde représentative des hélices les plus courantes et la dernière représentative des hélices à fort pas relatif.
La courbe ηx en noir de la figure 3 indique le rendement de Froude de l’hélice (celui de l’hélice parfaite équivalente) qui tend vers 1 lorsque ΔV tend vers 0 (Av ≈ 0,7) alors que la courbe η en rose donne le rendement de l’hélice tenant compte de toutes les pertes. On remarque que lorsque ΔV tend vers 0, le rendement tend vers 0. Ceci est normal, car comme pour une aile, la traînée réduite Cx persiste alors que la portance réduite Cz s’annule lorsque la traction tend vers 0. Une hélice n’est donc pas efficace lorsqu’elle est utilisée pour une force de traction très inférieure à celle pour laquelle elle est conçue (par exemple hélice de modèle 3D utilisée pour faire du vol en palier).
La figure 3 montre aussi que lorsqu’on diminue la vitesse d’avance en dessous d’un seuil critique, le coefficient de traction stagne alors que le rendement diminue progressivement jusqu’à zéro pour une avance nulle. Ceci vient du fait que lorsque ΔV dépasse un seuil critique, les pales comme des ailes décrochent et le coefficient de portance Cz ne peut plus augmenter. Lorsqu’on mesure la force de traction d’une hélice à l’arrêt (sauf dans le cas d’un rotor d’hélicoptère) on mesure la force de traction maximale au décrochage. La force de traction à rendement maximal (donc celle obtenue normalement en vol) n’est en fait typiquement que de 40 % de cette valeur.
N.B. : les courbes Ct et Cp des
figures 2, 3 et 4 proviennent d’une simulation dont le modèle, bien que très évolué,
a des difficultés à prendre parfaitement en compte tous les effets du
décrochage. En fait, dans les trois cas les courbes Ct et Cp sont plus
régulières dans la réalité et tendent vers des horizontales lorsque Av est en
dessous de 0,1 pour les figures 2 et 3 et en dessous de 0,2 pour la figure 4.
La figure 3 montre aussi que le rendement maximal d’une hélice est assez limité. Typiquement, il se situe entre 0,6 et 0,8.
Il est possible avec le logiciel JavaProp d’obtenir les caractéristiques complètes d’une hélice ou de trouver le dessin idéal d’une hélice si on souhaite en réaliser soi-même pour la compétition (racers). Les figures 1 à 5 ont au demeurant toutes été obtenues avec ce logiciel libre. La figure 5 donne le dessin d’une hélice bipale optimisée de 11"x7" (caractéristiques de la figure 3). On remarquera que la forme de la pale idéale n’est pas ellipsoïdale, contrairement à la forme de l’aile idéale. Ceci vient du fait que la vitesse augmente sur le profil au fur et à mesure que l’on s’approche de l’extrémité de la pale. La distribution de l’écoulement de l’air sur une pale est donc différente de celle sur une aile.

Figure 5 : cordes d’une hélice idéale
Le cas des pales d’hélicoptère est particulier. Le pas n’est pas constant le long des pales car c’est l’angle d’inclinaison β qui est constant tout au long des pales. De plus, le pas toujours très faible fait qu’on n’atteint jamais la zone de décrochage en vol normal. La courbe de traction obtenue avec des pales d’hélicoptère avec un calage normal s’approche de la courbe de la figure 2, mais avec une absence totale de zone de décrochage (zone irrégulière de gauche).
Choix du régime de rotation
L’équation 5 montre que la force de traction que peut fournir une hélice varie avec le carré de son régime de rotation. Il s’en suit qu’on a tendance à faire tourner très vite les hélices, d’autant plus que la puissance des moteurs thermiques et électriques est elle aussi proportionnelle au régime de rotation. Dans la pratique, l’extrémité des pales tournera souvent à la vitesse maximale de Mach 0,6 (0,6 fois la vitesse du son). C’est la limite si on ne veut pas subir les problèmes de compressibilité de l’air générant bruit et perte de rendement. Ceci conduit à une vitesse à l’extrémité des pales de 200 m/s soit environ 740 km/h.
Dans le cas des racers, on a besoin de pousser les hélices au maximum, ce qui conduit généralement à tourner plus vite : en général vers Mach 0,75. Ce n’est toutefois possible qu’en utilisant des profils supercritiques parfaitement adaptés (voir le chapitre sur l’aérodynamique et le site de Martin Hepperle [3] ) à faible Cz, sinon les ondes de choc supersoniques ruinent les performances.
Dans le cas des petits avions électriques lents (principalement slowfliers et indoor) on tourne moins vite. La vitesse d’extrémité de pales peut dans ce cas descendre jusqu’à 100 m/s (en deçà les hélices deviennent disproportionnées). Tourner relativement lentement est souvent une bonne idée, recommandée d’ailleurs par la FFAM, car le bruit des hélices augmente très rapidement avec la vitesse d’extrémité des pales.
Le tableau 1 donne le régime de rotation maximal en tr/mn pour des hélices de 6" à 15" pour une vitesse d’extrémité de pale de Mach 0,6 et 0,75. Mais il ne faut pas perdre de vue que certaines hélices devront être encore plus bridées pour des questions de résistance mécanique liées à la force centrifuge.
|
Diamètre |
Régime à Mach
0,6 |
Régime à Mach
0,75 |
|
6" |
25 000 tr/mn |
31 000 tr/mn |
|
8" |
19 000 tr/mn |
23 000 tr/mn |
|
10" |
15 000 tr/mn |
19 000 tr/mn |
|
12" |
12 500 tr/mn |
15 500 tr/mn |
|
15" |
10 000 tr/mn |
12 500 tr/mn |
Tableau 1 : régime de rotation des hélices en fonction de la vitesse de bout de pale
Choix du diamètre et du nombre de pales
Nous avons défini la force de traction Ft nécessaire dans le premier paragraphe de ce chapitre. L’équation 8 déduite de l’équation 6 nous permet de trouver le diamètre D adapté d’une l’hélice sous réserve de connaître Ct et N.
 (8)
(8)
Pour trouver Ct il existe plusieurs méthodes :
• La première consiste à trouver Ct avec JavaProp, mais attention, le résultat risque d’être approximatif si on ne fait pas les bons choix ou si on fait des mesures approximatives (profils, angles d’inclinaison, …). Par contre, si on maîtrise bien l’outil, il donne des résultats étonnamment précis.
• La seconde consiste à mesurer la force de traction Ft à l’arrêt d’une l’hélice de la famille considérée et d’en déduire le Ct en statique de la famille grâce à l’équation 6.
• La dernière consiste à utiliser les règles empiriques ci-après provenant de l’expérience et de nombreuses mesures.
• Pour les hélices bipales standard grises Nylon Graupner, (photo 2 en haut) comme pour les hélices bipales APC, le Ct statique est d’environ 0,09 pour une hélice de 10"x7" (c’est la valeur la plus courante pour les hélices bipales de toutes sortes).
• Pour les petites hélices, on diminuera Ct (-0,01 pour une hélice de 6") ; a contrario pour une grosse hélice, on augmentera Ct (+0,02 pour une hélice de 15").
• Pour les hélices à faible pas relatif, on diminuera Ct (-0,01 pour P/D = 0,5) ; a contrario pour les hélices à grand pas relatif, on augmentera Ct (+0,01 pour P/D = 1).
• Pour les autres modèles d’hélices, on procédera par comparaison aux hélices Graupner ou APC en considérant que Ct est proportionnel à la surface relative des pales (l’hélice CAMPROP Graupner de la photo 2 en bas, par exemple, a le même Ct que l’hélice standard de la photo 2 en haut). L’influence du Czmax du profil est très importante aussi, mais en pratique les fabricants d’hélices utilisent tous des profils ayant des Czmax très proches, sauf dans le cas des hélices d’indoor qui sont très creuses et exceptionnellement porteuses (elles ont d’ailleurs aussi, bien souvent, des cordes relatives inhabituellement élevées comme le montre la photo 2 au centre).

Photo 2 : hélices de 10" à 11"
Un détail qui a son importance : comme la traction d’une hélice est proportionnelle à la surface des pales, elle est aussi proportionnelle au nombre de pales. Si une hélice bipale ne tire pas assez, une hélice de même diamètre et même corde moyenne à trois ou quatre pales fera peut être l’affaire ! Au demeurant, au début des années 30, les avions de chasse utilisaient des hélices bipales. Avec la montée en puissance des moteurs, les hélices avaient pratiquement toutes trois pales en 1939 sur les mêmes avions. Comme en 1945 la puissance avait encore augmenté, on était passé à quatre et parfois cinq pales sans changer significativement le diamètre et le régime de rotation …
Par exemple : notre « mini F3A » de référence a besoin d’une force de traction de 22,5 N (voir paragraphe : besoin de traction). Si on considère qu’on monte à la vitesse de 69 km/h alors que la vitesse en palier est de 106 km/h (c.f. feuille de calcul électronique) et que notre courbe de traction est celle de la figure 3, on peut en déduire par une règle de trois l’avance : Av = 0,7x69/106 = 0,46. Si on suppose que l’hélice est standard avec un Ct statique de 0,09, on peut en déduire notre Ct dynamique en le lisant directement sur la figure 3 : Ct = 0,044 pour Av = 0,46.
Si on sait à quel régime on tourne, on peut enfin calculer le diamètre de l’hélice en utilisant l’équation 8. Supposons par exemple qu’on tourne à 11000 tr/mn (183 t/s). Il vient alors :
![]()
La courbe puissance réduite Cp de la figure 3 nous donne une information supplémentaire. Le coefficient de puissance Cp est égal à 0,29 à notre point de fonctionnement Av = 0,46, mais on peut l’estimer à 0,35 pour une avance nulle, c'est-à-dire à l’arrêt au sol. Ceci signifie que la puissance absorbée par l’hélice à l’arrêt à 11000 tr/mn est 0,35/0,29 = 1,2 fois plus élevée à l’arrêt qu’en montée à 19 m/s. Si on utilise un moteur électrique, cela signifie que le courant au sol, image de la puissance, est 1,2 fois plus élevé que dans la montée. Donc si le moteur est dimensionné pour la montée il sera en surcharge à l’arrêt au sol. C’est tout à fait acceptable, à condition que ça ne dure pas, car les moteurs électriques acceptent très bien des surcharges durant 10 à 30 secondes mais pas plus.
Choix du pas
Le diamètre de l’hélice pour un régime donné définit la force de traction, à peu près constante à faible vitesse (ou avance), puis diminuant pour s’annuler à un certaine vitesse (ou avance) ; le diamètre de l’hélice est donc déterminé par la traction maximale désirée donnée par l’équation 2. Le pas, lui, définit la vitesse de vol à laquelle la traction chute puis s’annule ; le pas de l’hélice est donc fixé par la vitesse de vol maximale désirée en palier.

Figure 6 : pas d’une hélice
Par définition, le pas d’une hélice est la distance P qu’elle parcourt dans la masse de fluide (air ou eau) en un tour de rotation. Il y a toutefois une imprécision qui vient du fait qu’une hélice a un pas qui dépend des conditions de fonctionnement. A la limite, en stationnaire, toutes les hélices ont un pas effectif (celui observé par l’avancement du modèle) nul. On utilise donc un pas de référence qui n’est d’ailleurs pas unanimement reconnu. On pourrait prendre le pas pour lequel la traction de l’hélice est nulle. L’hélice se visserait alors dans l’air selon la direction de portance nulle représentée dans la figure 6. Malheureusement, ce pas bien pratique n’est pas donné pour les hélices. Le pas indiqué le plus généralement est le pas dit « géométrique ». Il correspond au pas de la corde de référence du profil, c'est-à-dire au pas donné par l’angle β de la figure 6 qui montre la coupe d’une pale d’une hélice de diamètre D au rayon r. Ce pas géométrique P est défini par l’équation 9 :
P = r.tanβ (9)
Pour ce pas, l’hélice fournit une force de traction modérée mais non négligeable. Le pas effectif Peff est le pas réel dans des conditions de vol données, pas en général inférieur au pas géométrique P. Le pas effectif Peff donné par l’équation 10 est plus petit que P d’une fraction nommée recul R (R compris entre 0 et 1).
Peff = (1 – R).P (10)
Le recul R à la vitesse maximale d’un modèle est une valeur importante car elle permet de choisir le pas géométrique P de l’hélice grâce à l’équation 11 dans laquelle N est le régime de rotation de l’hélice en tr/mn.
![]() (11)
(11)
Le recul R est de l’ordre de 0,3 pour un modèle standard, il peut même être supérieur pour un modèle qui grimpe peu (maquette réaliste). Par contre, pour un avion d’acrobatie il est de l’ordre de 0,1 et peut même devenir nul pour un modèle de 3D.
Pour connaître le recul réel, il faut relever la force de traction Ft nécessaire au modèle à vitesse maximum, prendre les courbes de plusieurs hélices du bon diamètre mais de pas différents et trouver celle qui donne la traction la plus proche de Ft à la vitesse choisie.
Par exemple : notre « mini F3A » de référence a une vitesse maximale prévue d’environ 106 km/h (29 m/s) et une traînée en palier de 7,7 N à cette vitesse (voir feuille de calcul électronique). Si on suppose un recul de 0,1, l’équation 10 nous donne :
![]()
Si on observe la courbe de traction d’une l’hélice 13"x7" APC Standard générée par JavaProp à 11000 t/m, on observe une force de traction de 12 N à 29 m/s, supérieure aux 7,7 N de traînée. Ceci montre que notre hypothèse de recul de 0,1 est légèrement exagérée mais acceptable.
L’hélice de 13"x7" APC Standard convient donc a priori pour notre « mini F3A » s’il est équipé d’un moteur électrique tournant à 11000 tr/mn.
Malheureusement, les choses ne se passent pas toujours aussi bien, d’ailleurs dans le cas présent aucune hélice de série « électrique » n’a pu être trouvée, car tous les diamètres et tous les pas ne sont pas disponibles (qu’aurait t’on fait si on avait trouvé un pas de 6,5 ou pire de 12 alors qu’aucun pas de plus de 10 n’est proposé par les fabricants ?). De plus, comme tous les fabricants ne mesurent pas les pas de la même façon (c’est le même problème qu’avec les pointures de chaussures…) il convient en fait de prendre le pas le plus le proche trouvé par calcul puis faire des essais.
L’opération peut s’avérer laborieuse. Heureusement, il y a une solution peu connue en France, mais bien mieux en Allemagne toujours en avance dans le domaine du modélisme : l’hélice à pas réglable. Comme le nom le suggère, il s’agit d’hélices dont on peut régler le pas au sol à volonté. Seul le fabricant allemand RAMOSER [4] propose ce produit nommé VARIOPROP. Il est disponible sur Internet et en France dans quelques magasins. Ces hélices mériteraient d’être mieux connues (publicité gratuite) à plus d’un titre, car non seulement on peut régler leur pas, mais de plus elles existent en bipales, tripales et quadripales de plusieurs formes dont des formes maquette (voir photo 3). Une maquette sera incomparablement plus réaliste avec une tripale VARIOPROP bien choisie qu’avec une de nos sempiternelles bipales grises.

Photo 3 : pales "maquette" pour hélices à pas réglable VARIOPROP
Estimation du rendement
Connaître le rendement des hélices est important, car il influe sur le dimensionnement du moteur placé en amont. La valeur la plus juste du rendement est donnée par le logiciel JavaProp déjà mentionné dans ce chapitre (voir figures 2 à 4). Si on ne veut ou ne peut pas l’utiliser, on peut se contenter d’observer et retenir les résultats des figures 2, 3 et 4 qui sont typiques. Le rendement d’une bonne hélice tourne autour de 0,7 à son meilleur point de fonctionnement appelé point de conception. Il est intéressant toutefois de noter le résultat bien connu suivant :
• les hélices à faible pas relatif (P/D < 0,5) ont un rendement plus faible qui peut être aussi bas que 0,6 (figure 2),
• les hélices à fort pas relatif (P/D ≈ 1) ont le meilleur rendement qui peut atteindre 0,8 (figure 4).
Le dernier constat est d’ailleurs celui qui justifie qu’on utilise en F5B des hélices de grand diamètre tournant lentement. En effet, si on augmente de diamètre, pour maintenir Ft constant on va diminuer N, ce qui va conduire à augmenter le pas P encore plus que le diamètre D pour compenser. Ainsi, plus on diminue N, plus on augmente P/D pour maintenir constante la force de traction en vol en palier. Ceci permet en choisissant bien N d’atteindre l’idéal P=D ; valeur qui définit une hélice dite « carrée » (même si sa forme observable reste très différente !). L’inconvénient de ce procédé est que l’hélice plus grande est aussi plus lourde, et que la méthode ne peut s’appliquer que si on utilise un réducteur car sinon on est obligé de surdimensionner aussi le moteur dont l’embonpoint inutile devient alors trop pénalisant.
La propulsion par moteur à explosion
Le moteur à explosion – appelé aussi moteur à piston ou moteur thermique − qui va être brièvement étudié ici a régné presque sans partage dans l’univers de l’aéromodélisme depuis le début de la radiocommande pour propulser nos aéromodèles. Mon premier moteur COX Baby Bee (photo 4) de 1961 n’est guère différent de mon second (photo 5) acheté en 2005… Certains fabricants proposent en effet les mêmes moteurs depuis des décennies ; la société COX n’étant pas une exception en la matière. Ces moteurs ont rapidement évolué dans les années 50 et 60 (à l’instar des moteurs électriques dans la première décennie du 21ème siècle), puis la technologie s’est stabilisée et finalement figée. Toutefois, de nouvelles marques et modèles apparaissent encore, bien que le moteur électrique soit en passe de détrôner définitivement ce roi, car il pue, pète, vibre et bave une huile visqueuse. Quoi qu’il en soit, il conserve encore des adeptes car il a le charme incomparable des belles pièces mécaniques. Essayez de convaincre votre épouse que ce qui pue et pète a du charme. Si vous y arrivez, c’est qu’elle a la fibre modéliste.
En 2010 il reste encore un peu plus de 40 fabricants aux USA, Japon, Chine, Taiwan, Angleterre, Italie, Autriche, République Tchèque, Russie, etc., qui se partagent le marché. La France a malheureusement abandonné toute production depuis environ un demi-siècle.
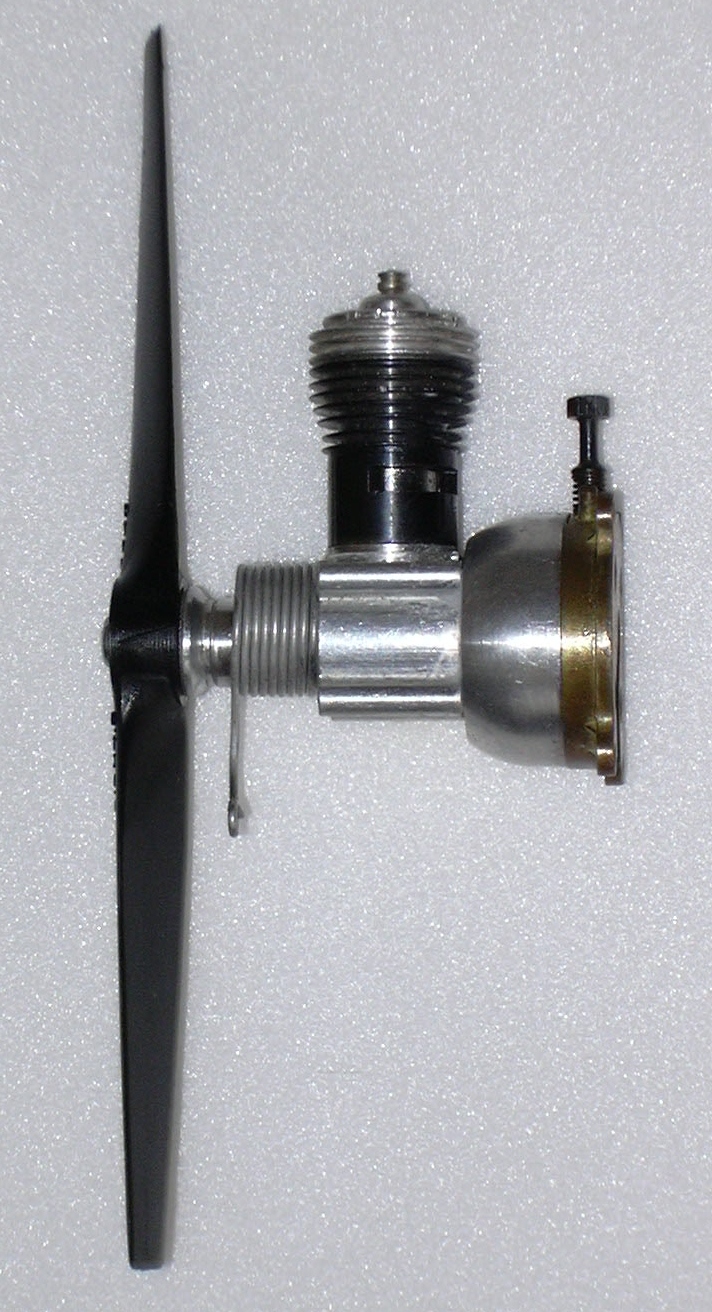

Photo 4 : moteur COX Baby-bee de 1961 Photo 5 : moteur COX Baby-bee de 2005
Principe de fonctionnement et comportement général
Le principe du moteur à explosion est connu de tous ou presque. Le principe général est le suivant :
• on comprime un mélange de carburant (essence, méthanol, kérosène…) et comburant (l’oxygène contenu dans l’air ambiant),
• on allume le mélange comprimé à l’aide d’une étincelle, d’une bougie à incandescence ou par surchauffe spontanée du gaz suite à sa compression,
• on récupère l’énergie libérée par la pression des gaz de combustion à l’aide d’un piston qui met en rotation l’axe de l’hélice.
De par son principe, le moteur thermique est avant tout un générateur de couple (force rotative) proportionnel à la pression des gaz chauds poussant sur le piston. Le couple produit dépend peu du régime de rotation ; il dépend essentiellement de la position du boisseau du carburateur (i.e. du réglage des gaz). La figure 7 donne les courbes de couple et de puissance caractéristiques à plein gaz d’un moteur deux temps classique de taille 32 (OS MAX-32SX), soit 32 centièmes de pouce cube de cylindrée ou encore 5,2 cm3, en fonction de son régime de rotation.
N. B. : Ces courbes ont été générées automatiquement à partir de la feuille de calcul électronique Moteurs1 [5] et de données génériques de moteurs standards. Elle n’est donc pas parfaitement exacte, mais malgré tout très proche de réalité. Cette feuille de calcul permet de générer les courbes de tous les moteurs 2 temps et 4 temps dont on connaît la puissance maximale et le régime de puissance maximale.

Figure 7 : couple et puissance du
moteur OS MAX-32SX
Du fait que le moteur à explosion est un générateur de couple, la commande de gaz contrôle le couple, mais pas le régime de rotation. Le régime de rotation effectivement obtenu en vol est déterminé par l’interaction moteur/hélice. Ce régime est celui auquel l’hélice absorbe exactement le couple. Ainsi, si on charge plus l’hélice (accentuation d’une montée par exemple) le moteur ralentira jusqu’à ce que l’hélice absorbe à nouveau juste le couple fourni par le moteur. On observe la même chose si on remplace l’hélice courante par une hélice plus grande : le moteur ralentira jusqu’à rétablir l’équilibre entre le couple fourni par le moteur et celui absorbé par l’hélice (voir figure 8).
Comme le couple absorbé par une hélice augmente rapidement avec son régime de rotation et est aussi fonction de sa vitesse d’évolution dans l’air, il est tout à fait normal qu’un moteur ayant sa puissance maximale à 18000 tr/mn comme celui dont les caractéristiques sont présentées en figure 7 ne tourne qu’à 12000 tr/mn sur un banc statique. Le moteur accélérera en vol.
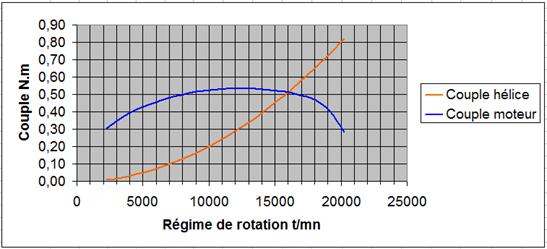
Figure 8 : point de fonctionnement
d’un moteur OS MAX-32SX
La puissance d’un moteur est par définition son couple multiplié par le régime de rotation. Les deux courbes sont donc strictement liées mathématiquement, de l’une on peut directement déduire l’autre et réciproquement. Il faut voir le couple comme une force, c'est-à-dire une volonté de produire un travail, mais qui ne s’exprime que si elle peut provoquer un mouvement. La puissance est ce travail qui dans le cas d’un moteur à piston est donc égal au produit du couple par le régime de rotation. La puissance est donc l’effet du couple, d’autant plus important que le couple arrive à faire tourner rapidement le moteur. Pour tirer le maximum d’un moteur il faudra donc faire en sorte que l’hélice laisse tourner le moteur à son régime de puissance maximale.
Malgré les apparences, nos moteurs d’aéromodélisme tournent lentement comparativement à leur taille. Ils sont en fait délibérément bridés par la limitation de la taille des lumières et surtout de l’ouverture du carburateur afin d’éviter que l’hélice tourne à régime supersonique (voir tableau 1). Dans le cas des moteurs 2 temps actuels comme celui dont les courbes sont données à la figure 7, ce critère n’est pas strictement respecté pour des questions commerciales. En effet, l’acheteur potentiel est très attiré par la puissance maximale affichée du moteur, elle-même directement liée au régime de rotation ; d’où la tentation des constructeurs de laisser leurs moteurs tourner trop vite au grand dam des oreilles sensibles !
Il est d’ailleurs essentiel de bien comprendre qu’une
hélice trop petite sera non seulement bruyante mais de plus dangereuse pour un
moteur à explosion à cause du surrégime potentiel, alors qu’elle soulagerait un
moteur électrique. A l’opposé une hélice trop grande protégera un moteur à
explosion en calmant ses ardeurs excessives, alors qu’elle risquerait de
griller un moteur électrique par surcharge et donc surchauffe.
Les cycles moteur
Les moteurs se
distinguent par le cycle : deux temps ou quatre temps. Ils se distinguent
aussi par la méthode d’allumage du mélange carburant/comburant. Ils se
distinguent encore par le type de carburant utilisé et par la configuration
mécanique (forme et position du piston, nombre de cylindres). Tout peut se combiner
d’un point de vue technique, mais toutes les combinaisons ne se trouvent pas
dans le commerce. Le classement traditionnel distingue principalement les deux
types de cycles utilisés, les autres différences définissent des sous
variantes. Le fonctionnement des deux cycles est donné ici.
Cycle quatre temps
Le cycle le plus classique, celui des moteurs de nos voitures, est le
cycle à quatre temps dont chaque temps est montré sur la figure 9 animée, et
précisé ci-après :
1. Aspiration du mélange air/carburant (gaz
frais) par la descente du piston. La soupape d’admission est ouverte durant
cette phase.
1.
Compression
du mélange air/carburant par remontée du piston. Les deux soupapes sont fermées
durant cette phase. A la fin de la phase de compression le mélange
air/carburant est allumé par un des moyens suivants : étincelle, point
chaud ou surchauffe par compression.
2. Détente des gaz par redescente du piston et
production du couple mécanique. Les deux soupapes sont fermées durant cette
phase. La combustion du mélange air/carburant entre les phases deux et trois a
fortement augmenté la pression du mélange air/carburant ; c’est la source
d’énergie du moteur.
3. Échappement des gaz brûlés. Durant cette
seconde phase de remontée du piston la soupape d’échappement est ouverte et les
gaz brûlés sont chassés vers le pot d’échappement.

Figure 9 : cycle quatre temps (source Wikipédia)
Le cycle quatre temps est plus efficace que le cycle deux temps. C’est la raison pour laquelle il équipe quasiment toutes les voitures et motos. Par contre, il impose une cylindrée plus importante pour la même puissance que le moteur à deux temps. Il nécessite de plus des soupapes avec un mécanisme de commande relativement compliqué ; c’est la raison pour laquelle on préfère bien souvent en modélisme les moteurs à cycle deux temps.
La complexité rend nos moteurs quatre temps beaucoup plus chers que les moteurs à deux temps, mais beaucoup plus beaux et silencieux. De plus, comme ils tournent plus lentement, leur puissance est plus exploitable (voir plus loin au paragraphe « adaptation à l’hélice et au modèle »).
En dehors des types classiques (voir photo 6) et multicylindres dérivés (voir photo 1) on trouve des moteurs très compacts : les moteurs britanniques RCV [6] dont le cylindre est dans le prolongement de l’axe de l’hélice (photo 7). Ce moteur n’a pas de soupape au sens classique du terme. La chemise du cylindre trouée tourne sur elle-même et découvre alternativement l’échappement et l’admission. Le haut du cylindre porte l’axe de l’hélice entraîné par la rotation du cylindre.
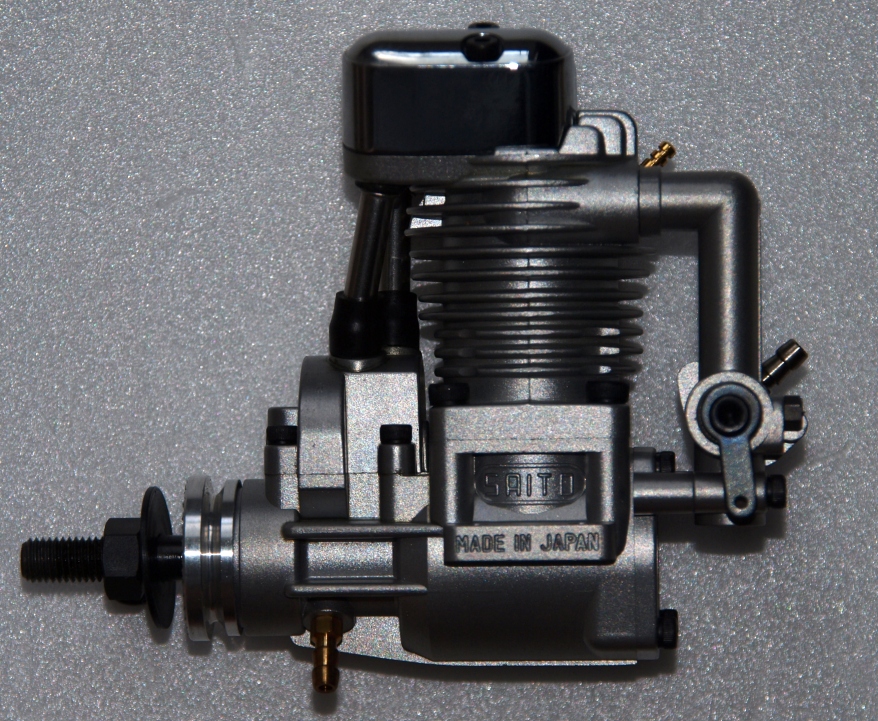

Photo 6 : moteur 4 temps 5 cm3 SAITO Photo 7 : moteur RCV60-SP à cylindre dans l’axe de l’hélice
La complexité mécanique du moteur à quatre temps a conduit les ingénieurs à chercher des solutions mécaniques plus élégantes pour obtenir les quatre phases du moteur à quatre temps. La solution la plus connue est celle de l’ingénieur Wankel avec son moteur éponyme (voir figure 10). Dans ce cas le piston est de forme générale triangulaire et tourne autour de l’axe de l’hélice entraîné en rotation par un engrenage entre piston et axe de sortie. Avec cette solution, il n’y a plus que deux pièces en mouvement au lieu d’une dizaine…

Figure 10 : moteur Wankel (source Wikipédia)
Grâce à cette simplicité, le moteur Wankel OS-49PI fabriqué par OS en collaboration avec Graupner (photo 8) est capable de délivrer 1,27 CV sans le bruit suraigu et les vibrations des 2T malgré une masse d’à peine 335 g.
On peut noter à propos du moteur Wankel OS-49PI que non seulement il pourrait parfaitement convenir à notre « mini F3A », mais il serait même plus le performant des choix qui vont être proposé grâce à une puissance supérieure à l’OS MAX-32SX (caractéristiques données dans la feuille de calcul Moteurs2), une consommation et un bruit comparables à l’OS MAX-FS52S et un encombrement comparable au moteur électrique TM350-20/10. Il serait idéal dans une maquette de P38 d’environ 2 m d’envergure dans lequel il serait complètement caché grâce à sa forme, et ferait parfaitement maquette avec une hélice tripale VARIOPROP adaptée.

Photo 8 : moteur Wankel OS-49PI
Cycle deux temps
Les moteurs dits
« deux temps » utilisent en fait un cycle quatre temps mais les
phases sont exécutées deux par deux en parallèle, une par chaque face du
piston. La figure 11 animée illustre parfaitement le cycle deux temps avec ici
en prime l’utilisation d’un résonateur qui est décrit plus loin dans ce
chapitre. Le cycle commence lorsque le piston est au point mort bas et les
actions se succèdent dans l’ordre ci-après :
1.
Dans la
première phase le piston monte, comprime avec sa face supérieure le mélange
air/carburant et aspire avec sa face inférieure le mélange air/carburant pour
le cycle suivant. Le mélange peut rentrer dans la partie basse du moteur, selon
le système retenu, soit grâce à une lumière pratiquée dans le vilebrequin
(photo 9), soit grâce à un disque à fente entraîné par le vilebrequin (photo
10), soit par une lumière d’admission pratiquée dans le bas du cylindre et du
piston (photo 15), soit encore par un clapet comme sur le schéma de la figure
11 et sur le moteur TAIFUN de la photo 17. A la fin de la première phase, le
mélange air/carburant est allumé par un des moyens suivants : étincelle,
point chaud ou échauffement par compression.
2.
Dans la
première partie de la seconde phase, le mélange qui vient d’être allumé voit sa
pression fortement augmenter et pousser le piston vers le bas, tandis que le
mélange air/carburant emmagasiné dans le bas du moteur est comprimé. Dans la
seconde partie de la seconde phase les gaz brûlés s’échappent par la ou
les lumières d’échappement pratiquées
dans le bas du cylindre, en même temps que les gaz frais entrent dans le
cylindre par les lumières de transfert opposées aux lumières d’échappement.
Un des points
faibles du système est la tendance des gaz frais à partir directement vers
l échappement. Cet effet peut être limité par une orientation adaptée des
conduits et lumières, mais il peut être atténué encore plus par l’utilisation
d’un résonateur qui fonctionne sur le principe suivant (voir figure 11) :
lors du début de l’échappement une onde de surpression entre dans le
résonateur, est réfléchie à l’extrémité du résonateur vers le milieu de phase
d’échappement, puis bloque les gaz qui voudraient encore s’échapper à la fin de
la phase d’échappement.

Figure 11 : cycle deux temps avec résonateur


Photo 9 : admission par l’avant (ouverture dans le
vilebrequin) Photo 10 :
admission par disque arrière
La simplicité mécanique des moteurs deux temps les rends très légers et donc appréciés en modélisme. On peut distinguer deux sous-classes :
· Les moteurs économiques à balayage en « cloche » (voir photo 11). Ces moteurs n’ont qu’une lumière de transfert opposée à la lumière d’échappement. Les gaz frais sont orientés vers le haut par une chicane placée sur le piston. Pour diminuer encore leur prix, ces moteurs utilisent souvent un vilebrequin sur palier lisse en bronze.
· Les moteurs à balayage en boucle dits Schnürle (voir photo 12) plus performants mais plus chers. Ces moteurs ont deux lumières de transfert (parfois plus) placées latéralement et orientées vers le haut afin que les gaz frais montent en parcourant une boucle dans le cylindre. Ces moteurs plus élaborés bénéficient en général de roulements à billes pour guider le vilebrequin.
Une comparaison fine des deux types de balayage montre que la supériorité du balayage Schnürle n’est pas si évidente qu’il parait, car par exemple l’OS MAX-32SX à distribution Schnürle donne 1,2 CV à 18000 tr/mn pour 270 g alors que l’OS MAX-46LA, certes de cylindrée nettement supérieure, à distribution en cloche nettement moins cher donne lui aussi 1,2 CV mais à 15000 tr/mn pour la masse de 272 g… En fait, la différence réelle tient plutôt dans la plus grande durée de vie du moteur Schnürle liée à la présence de roulements à billes, et à la plus grande facilité de réglage du moteur Schnürle du fait d’un carburateur plus élaboré. Deux éléments non liés au principe Schnürle.
Un autre point qui mérite qu’on y prête attention est le fait que les constructeurs, pour avoir une gamme plus étoffée, ont souvent tendance à proposer des moteurs semblables en deux alésages différents. Pour des masses semblables, on aura alors tout intérêt à choisir l’alésage le plus grand et donc la cylindrée la plus importante ; il sera par exemple astucieux de préférer l’OS MAX-46LA de 1,2 CV à l’OS MAX-40LA de 1 CV de même masse et dimensions.


Photo11 : balayage en cloche OSMAX 15LA Photo 12 : balayage Schnürle ASP52
Noter l’absence de roulement à gauche (pas de renflement du carter) et les aiguilles de gicleur déportées
Les éléments du moteur à explosion
Le nom, la
constitution et la fonction de chaque élément constituant un moteur à
explosion, visible sur les figures 9 et 11, sont précisés ici en partant des éléments
du haut vers ceux du bas.
La culasse
La culasse est la
partie supérieure du moteur. Elle porte la bougie d’allumage et sa partie
inférieure en creux délimite la chambre de combustion. Cet élément est presque
toujours en alliage d’aluminium car l’aluminium transmet bien la chaleur, et
c’est à cet endroit que le maximum de chaleur doit être évacué. La culasse est
presque toujours démontable en enlevant quatre ou six vis.
Dans le cas d’un
moteur à quatre temps, la culasse porte aussi les soupapes avec leur ressort de
rappel qui en assure la fermeture. Les soupapes sont commandées par un ou
plusieurs arbres à cames tournant à la moitié de la vitesse du vilebrequin,
visibles juste au-dessus des soupapes dans la figure 9. Cette configuration
classique dans le monde automobile nommée « arbre en came en tête »
ne se retrouve quasiment jamais dans le monde modéliste. Les moteurs de
modélisme utilisent plutôt la configuration « moteur culbuté » présentée à la figure 12. Dans cette
configuration l’arbre à cames unique est entraîné directement par le
vilebrequin grâce à un jeu d’engrenages, il entraîne à son tour dans un
mouvement alternatif les deux tiges de culbuteurs qui commandent les culbuteurs
qui inversent le sens du mouvement pour finalement pousser sur les soupapes.

Figure 12 : distribution d’un moteur culbuté (source
Wikipédia)
L’ensemble cylindre/piston
Le piston assure le mouvement
alternatif linéaire guidé par le cylindre et la transformation de l’énergie de
pression en mouvement mécanique.
Le cylindre assure
quatre fonctions :
·
guidage
du piston,
·
étanchéité
pour empêcher les gaz de fuir vers le bas moteur,
·
lubrification
pour limiter frottement, usure et échauffement entre piston et cylindre,
·
évacuation
de la chaleur.
Pour que l’ensemble
fonctionne bien il faut une parfaite adaptation entre piston et cylindre, tant d’un
point de vue matériau que d’un point de vue dimensionnel. La majorité des
solutions conduisent à utiliser un cylindre chemisé, c'est-à-dire que la partie
interne (en contact avec le piston) du cylindre est un tube (chemise) introduit
en force dans une partie externe an alliage d’aluminium (pour la conduction de
la chaleur) avec des ailettes. On trouve dans le commerce cinq solutions :
·
Piston en alliage d’aluminium et cylindre
chemisé en acier : c’est la
solution la plus classique, mais elle impose (sauf pour les plus petits
moteurs) un segment qui est un anneau élastique en fonte dans la partie haute
du piston pour assurer l’étanchéité (deux sont visibles à la figure 9 et un à
la figure 11). Comme le coefficient de dilatation de l’aluminium est très supérieur
à celui de l’acier, on laisse un jeu mécanique important entre les deux pièces
qui disparaît avec l’échauffement ; mais il faut un segment pour assurer
l’étanchéité au démarrage et aux températures intermédiaires.
·
Piston en fonte et cylindre en acier rodés
l’un sur l’autre : cette
configuration utilisable uniquement pour les petits moteurs à cause du poids du
piston est idéale. Le jeu entre piston et cylindre est réduit au minimum, il
n’y a pas de problème de dilatation car les deux matériaux ont le même
coefficient de dilatation. Par contre, comme cylindre et piston sont appariés,
on ne pourra pas les acheter séparément. Si le choix des nuances de métal est
bien fait, le cylindre s’use doucement en même temps que le piston voit son
diamètre augmenter par le tassement lié aux explosions successives, et
l’ensemble devient alors quasiment inusable.
·
Moteur ABC : piston en alliage
d’Aluminium, cylindre chemisé en laiton (Brass en anglais) plaqué Chrome. Dans cette solution, le chrome
dur poreux assure la résistance à l’usure et favorise la lubrification. En
raison de la différence de coefficient de dilatation entre aluminium et laiton
et la différence de température en fonctionnement entre le haut et le bas du
cylindre, on usine la chemise de cylindre de façon conique. A froid le piston
serre légèrement dans le piston à proximité du point mort haut ; le
phénomène disparaissant à chaud car le cylindre prend alors une forme
cylindrique en se dilatant plus vers la chambre de combustion. Le piston et le cylindre
des moteurs ABC doivent être parfaitement appariés comme dans le cas de
l’association acier/fonte, et ne peuvent donc pas non plus être achetés
séparément.
·
Moteur ABN : variante du moteur ABC où le chrome est remplacé par du nickel (un peu
plus sombre à l’œil que le chrome).
·
Moteur AAC : piston en alliage
d’Aluminium, cylindre en alliage d’Aluminium plaqué Chrome. Cette solution technique est très
intéressante car elle évite l’utilisation d’une chemise, ce qui permet de
réaliser des moteurs plus légers qui chauffent moins. Elle est peu utilisée car
elle nécessite une parfaite maîtrise du chromage de l’aluminium (opération très
délicate).
Lorsque le piston
est tout en haut du cylindre (gaz comprimés au maximum) on dit qu’il est au point
mort haut. Lorsqu’il est en bas, on dit qu’il est au point mort bas.
La distance parcourue par le piston entre les points morts haut et bas
s’appelle la course. Le volume balayé ente les deux points morts définit
la cylindrée. Lorsque le diamètre du cylindre est égal à la course on
dit que le moteur est « carré » ; on est toujours proche
de cette configuration. Un moteur avec une course supérieure au diamètre est
dit « longue course » ; c’est une configuration favorable
aux moteurs lents. Un moteur avec une course inférieure au diamètre est dit
« hyper carré » ; configuration permettant d’augmenter le
régime maximal de rotation.
Un moteur carré de
0,8 cm3 a une course et un diamètre de cylindre de exactement 1 cm,
tandis que le même moteur d’une cylindrée de 80 cm3 aura une course et un
diamètre de 4,67 cm.
Le volume restant
entre culasse et piston au point mort haut s’appelle le volume mort. Le taux
de compression est le rapport entre le volume dans le cylindre au point
mort bas et le volume mort. Le taux de compression doit être parfaitement
choisi pour que le moteur fonctionne correctement. Il est fonction
principalement (par ordre d’importance décroissante) du carburant, de la
bougie, du régime de rotation nominal et de la cylindrée.
La bielle
La bielle assure la
liaison entre le mouvement alternatif (piston) et le mouvement rotatif
(vilebrequin). Le pied de bielle est relié au piston via l’axe de piston et la
tête de bielle est reliée au vilebrequin via le maneton. La bielle subit des
efforts très importants, elle est donc souvent en alliage d’aluminium à haute
résistance, parfois en acier.
Le vilebrequin
L’axe de l’hélice
constitue une extrémité du vilebrequin. L’autre extrémité est le maneton, axe
parallèle à l’axe d’hélice, mais décalé d’une demi course. L’axe de l’hélice
est en général guidé par deux roulements à billes. Parfois les roulements à
billes sont remplacés par un palier lisse en bronze phosphoreux poreux ;
ces moteurs plus légers prennent malheureusement rapidement du jeu par usure du
palier en bronze et leur fonctionnement se dégrade alors rapidement. Le
vilebrequin est toujours en acier à haute résistance.
Dans la majorité des
moteurs 2T le vilebrequin est creux et contrôle l’arrivée des gaz frais. Dans
le cas des moteurs 4T, l’axe d’hélice comporte un engrenage pour commander
l’arbre à cames. Les moteurs 4T n’utilisent jamais de palier lisse car le bas
moteur est moins bien lubrifié que dans le cas des 2T car les gaz frais, et
donc l’huile de lubrification, ne transitent pas par le bas moteur.
Le carter
Le carter du moteur
porte l’ensemble des pièces mobiles et fixes, et inclut le plus souvent la
partie externe avec des ailettes du cylindre. C’est en général une pièce moulée
en alliage d’aluminium. Parfois on utilise un alliage de magnésium plus léger,
mais ce matériau présente l’inconvénient d’être très sensible à la corrosion.
Parfois le carter (ou certaines autres parties) sont anodisées ou vernies afin
d’améliorer l’esthétique. C’est en particulier le cas des moteurs britanniques
Irvine (photo 13).

Photo 13 : moteur britannique laqué Irvine
Caractéristiques de couple et de puissance
Comme précisé au paragraphe sur le comportement général du moteur à explosion, il se comporte comme un générateur de couple. Ce couple, comme on peut le vérifier à la figure 7, varie peu en fonction du régime jusqu’à celui auquel l’air n’a plus le temps de pénétrer suffisamment dans le moteur à cause des restrictions, principalement celle du carburateur.
La puissance, produit du couple par le régime de rotation, passe par un maximum au régime où le couple baisse autant que le régime augmente. Ce régime est important, car c’est celui auquel on tire le maximum du moteur, à condition qu’il soit compatible avec le bon fonctionnement de l’hélice.
La puissance d’un moteur doit être choisie en fonction de la puissance nécessaire pour le modèle et de critères supplémentaires liés aux caractéristiques propres de chaque moteur. La puissance maximale Pmax en CV d’un moteur, déterminée par l’équation 12, peut être estimée en fonction de son régime nominal d’explosions Enom en milliers d’explosions par minute (régime de la puissance maximale), de sa cylindrée V en cm3 et d’un coefficient de qualité λ donné dans le tableau 2.
![]() (12)
(12)
N.B. : 1 CV = 736 W et 1 HP = 745 W
|
Type |
λ minimal |
λ nominal |
λ maximal |
|
2T à balayage en cloche |
0,0085 |
0,0105 |
0,0125 |
|
2T à balayage Schnürle |
0,0100 |
0,0120 |
0,0140 |
|
4T |
0,0155 |
0,0170 |
0,0185 |
|
Wankel |
|
0,0150 |
|
Tableau 2 : coefficient de qualité λ des moteurs à explosion
On remarquera d’abord que comme un moteur 4T ne produit une explosion que tous les 2 tours de vilebrequin, son Enom est la moitié de son régime de rotation Nnom, alors que Enom = Nnom dans le cas d’un 2T.
Le coefficient λ − accessoirement inversement proportionnel à la consommation − est une image de la qualité du remplissage des cylindres et de l’exploitation de la détente des gaz. Un moteur bien conçu aura donc un coefficient λ élevé (typique des moteurs japonais). Mais attention : si λ est trop élevé c’est probablement qu’il y a tricherie ou erreur ; ça arrive encore de nos jours ! D’une façon générale, on peut remarquer que la distribution en « cloche » en nette régression conduit à une puissance moindre (et donc une plus grande perte de mélange dans l’échappement) que la distribution « Schnürle » (en boucle), mais que le moteur 4T reste de loin le meilleur.
Types d’allumage et bougies
Concepts et options
Le mélange air/carburant doit être allumé un peu avant le point mort haut du piston. Il faudrait choisir exactement le point mort haut si la vitesse de combustion était infinie. Comme elle est limitée, il faut anticiper un peu ; c’est ce qu’on appelle l’avance à l’allumage. L’avance à l’allumage doit être d’autant plus importante que le moteur tourne vite et qu’il y a de gaz à brûler (autrement dit que la commande de gaz est ouverte).
La méthode d’allumage utilisée sur les premiers moteurs de modélisme était celle de nos voitures : l’allumage par bougie à étincelles. Elle est toujours utilisée pour les moteurs de grosse cylindrée (photo 12) car elle permet d’utiliser l’essence beaucoup moins chère que le méthanol comme carburant. Cela n’empêche pas certains modélistes d’adapter un allumage à étincelles sur leur moteur de 10 cm3 et plus sans changer de carburant car la puissance augmente un peu du fait d’un meilleur contrôle de l’avance à l’allumage, et surtout parce que le ralenti devient nettement plus stable.
Les moteurs dits « à essence » (photo 14) sont des moteurs 2T à allumage par bougie à étincelles comme les moteurs de tronçonneuses. On ne les utilise plus que dans les grosses cylindrées (25cc et plus) où le budget du carburant au méthanol devient excessif. Leur avantage, outre qu’ils brûlent un carburant bien moins cher, est qu’ils en consomment deux fois moins et que leur ralenti est plus stable.
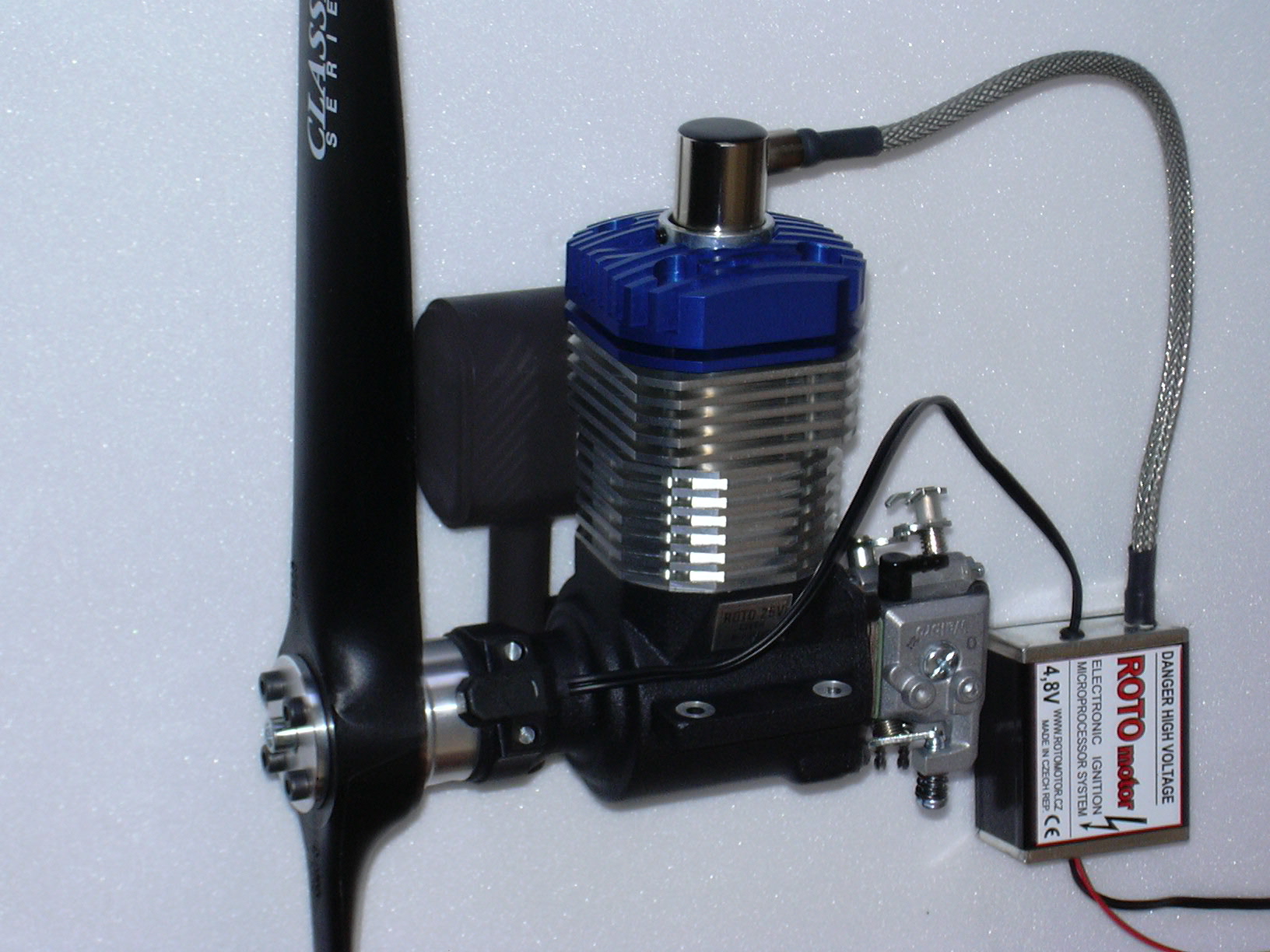
Photo 14 : moteur ROTO-25 à essence
Une variante appelée « magnéto » consiste à utiliser une bobine placée à proximité immédiate d’un volant lié à l’axe de l’hélice et possédant un petit aimant (voir photo 15). Lorsque l’aimant passe devant la bobine, une forte tension est induite, ce qui déclenche l’étincelle dans la bougie reliée électriquement à la bobine. Cette technique permet de profiter des avantages de l’allumage à étincelles sans nécessiter de batterie ni d’électronique.

Photo 15 : moteur ZENOAH à allumage par magnéto (photo Weymuller)
L’allumage par bougie à étincelle étant relativement compliqué, on a mis au point une méthode nettement plus simple juste après la seconde guerre mondiale. Elle consiste à utiliser une bougie à incandescence (glowplug en anglais) utilisant un filament en platine. Le filament est chauffé au rouge par les explosions successives et allume le mélange air/carburant lorsqu’il a été lui-même suffisamment chauffé par la compression. C’est la méthode d’allumage de très loin la plus utilisée en modélisme en raison de sa simplicité. L’efficacité du système tient au fait que lorsque le moteur tourne plus vite ou que la commande de gaz est plus ouverte, la bougie chauffe plus et augmente l’avance à l’allumage, juste comme il faut.
L’inconvénient principal de la méthode est qu’elle ne marche qu’avec un carburant à base de méthanol relativement coûteux et peu énergétique qui induit une forte consommation. Mais cela n’empêche pas l’immense majorité des moteurs de modélisme d’utiliser cette méthode devenue presque exclusive en RC pour les cylindrées inférieures ou égales à 10 cm3. La photo 16 montre une photo de famille des quelques moteurs 2T dits « glowplug ».
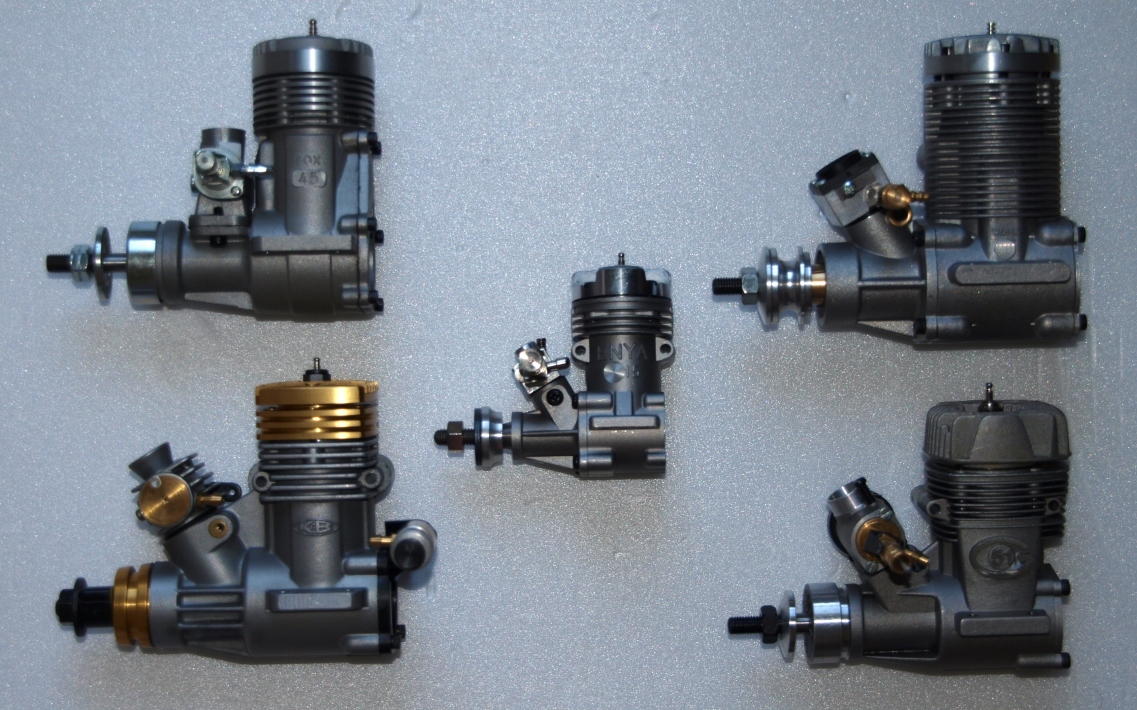
Photo 16 : quelques moteurs 2T « glowplug ». Haut gauche FOX (USA), centre ENYA (Japon), haut droite WEBRA (Autriche),
bas gauche K&B (USA) et bas droite SUPER-TIGRE (Chine). Noter le capuchon de carter agrandi chez FOX et
le démontage du carter par l’avant chez ENYA.
Quoi qu’il en soit, il existe une méthode encore plus simple qui consiste à utiliser un carburant détonnant à faible température et utiliser l’échauffement produit par la compression pour provoquer l’allumage. Les moteurs utilisant cette méthode sont dits à « autoallumage ». Le bon fonctionnement est obtenu avec un combustible à base de pétrole dopé à l’éther. Pour que le mélange s’allume au bon moment il faut que la compression soit réglée de façon très précise, c’est pourquoi ces moteurs utilisent un contre-piston de réglage de compression déplacé par une vis située au sommet de la culasse (voir photo 17).
On appelle parfois ces moteurs « moteurs Diesel » mais à tort car ils n’utilisent pas exactement le même principe. Ils ont presque complètement disparu des terrains de modélisme français alors qu’ils restent utilisés dans d’autres pays comme les Etats-Unis d’Amérique où la société DAVIS Diesel [7] vend par Internet des adaptations pour de nombreux moteurs à « glowplug ».
Le fabricant britannique PAW [8] (photo 17 à droite) offre pour sa part une gamme complète de moteurs à autoallumage et les vend par internet. Il existe d’autres fabricants dans les pays de l’Est et en Inde.

Photo 17 : quelques moteurs modernes et anciens à autoallumage. MVVS (Rep. thcèque) à gauche, PAW (Grande Bretagne) à droite
Au centre haut un
moteur MILLS (années 30) et au centre bas un moteur TAIFUN (années 60)
Les avantages de l’autoallumage sont : consommation deux fois moindre, puissance légèrement augmentée, ralenti plus stable, pas de besoin de batterie de démarrage et pas besoin de renoncer à voler parce que la dernière bougie est grillée. Un modéliste qui veut se distinguer devrait avoir au moins un de ces moteurs difficilement trouvable aujourd’hui en France ; un des avantages étant qu’utiliser ce type d’allumage permet précisément de se distinguer.
Les bougies
Les bougies à incandescence ont typiquement l’aspect de la photo 18. Le filament est relié mécaniquement et électriquement entre le corps de la bougie et la borne centrale isolée par une céramique visible sur la photo 19. La liaison électrique sert à appliquer une tension de 1,5 V à l’aide d’une batterie Cadmium/Nickel pour préchauffer le filament. Le préchauffage est rendu nécessaire car tant que le moteur n’a pas démarré le filament ne chauffe pas, et tant que le filament ne chauffe pas le moteur ne peut pas démarrer…

Photo 18 : bougie à incandescence (source Lindinger Modellbau [9])
Il y a un très grand choix de marques et de bougies. Les bougies à incandescence sont classées en température. Le classement s’étend de très froide à très chaude en passant par froide, moyenne et chaude. Mais chaque fabriquant a son système de classement et numérotation ; parfois difficile à comprendre. Le choix de la température de bougie est très important car il détermine l’instant d’allumage. Si la bougie est trop chaude ou trop froide, l’allumage est précoce ou tardif, et le moteur fonctionne alors moins bien. Pour un premier choix le mieux et de se fier à la notice du moteur ou à défaut de choisir une bougie moyenne (medium en anglais). Pour affiner le choix on pourra prendre en compte les critères suivants :
· par temps froid et humide il faut utiliser une bougie plus chaude,
· les petits moteurs (2,5 cm3 et moins) nécessitent souvent une bougie plus chaude,
· un carburant avec plus de nitrométhane nécessite une bougie plus froide,
· une compression forte implique une bougie froide,
· un moteur 4T doit utiliser une bougie spéciale 4T (chaude).
Pour compliquer un peu plus les choses il faut savoir qu’il existe des bougies faites pour 2 V au lieu de 1,5 V ; il faut les alimenter avec une batterie au plomb de 2 V. Il existe aussi des bougies à filetage long pour les gros moteurs à ne pas mettre là où une bougie à filetage court est prévue, au risque de voir la bougie être heurtée par le piston. On trouve encore d’autres types de bougies plus ou moins spéciales, dont certaines ont une petite tige de protection du filament appelée barrette de ralenti sensée contrer les calages à la reprise.
Le choix des bougies à étincelle (voir photo 19) est moins critique que celui des bougies à incandescence. Mais là encore il a un problème de température. Trop froide, la céramique interne de la bougie va s’encrasser et l’étincelle disparaître ; trop chaude, l’électrode centrale va finir par commencer à fondre (perlage), ce qui changera l’écartement entre l’électrode centrale et latérale et arrêtera aussi l’étincelle. Étant donné les variantes dimensionnelles, le mieux est de toujours s’en tenir aux recommandations du fabricant du moteur et de ne changer de bougie qu’en cas de problème de température avéré (perlage ou encrassement de la céramique centrale).
Le réglage de l’écartement entre les deux électrodes d’une bougie à étincelles est très important. C’est la première chose à vérifier en cas de problème d’allumage. L’écartement à maintenir dépend du circuit électrique (ou électronique) d’allumage. Il peut varier de 0,3 mm à 1 mm selon les cas. Un écartement trop fort empêche toute étincelle, un écartement trop faible en diminue l’efficacité. Dans le cas d’un allumage à magnéto l’écartement doit rester faible et bien réglé, car dans ce cas la tension d’allumage, proportionnelle au régime de rotation est très limitée au démarrage qui nécessitera des impulsions très énergiques.

Photo 19 : bougie à étincelles (source Lindinger Modellbau)
Dispositifs de préchauffage et annexes
Les magasins de
modélisme offrent une multitude de clips, pinces et dispositifs d’alimentation
au sol pour les bougies à incandescence : monoblocs ou sous forme de pince
avec une batterie déportée. On trouve aussi des circuits permettant de
transformer le 12 V de la batterie du démarreur en 1,5 V permettant ainsi
d’économiser une batterie. Cet accessoire dispose souvent de ce qui devrait
être obligatoire, à savoir un ampèremètre. En effet, les faux contacts et
bougies grillées étant monnaie courante, l’ampèremètre est un élément de diagnostic
très précieux.
Un « chauffe
bougie » embarqué (voir photo 20)
n’est pas indispensable, et même rarement utilisé, mais il représente
néanmoins une amélioration intéressante car les bougies à incandescence ont
tendance à être trop froides à faible puissance. Le chauffe bougie embarqué
fait passer un courant dans la bougie d’autant plus important que la commande
de gaz est proche du ralenti, mais supprime tout courant au-delà d’environ un
tiers de gaz. Ceci qui a pour effet de rendre le ralenti plus lent et plus
stable.

Photo 20 : chauffe bougie embarqué (source Just Engines [10])
Les carburants
Nos micromoteurs
n’utilisent pas, sauf exception, l’essence de voiture, entre autre à cause du
système d’allumage différent et aussi parce que le carburant en modélisme doit
assurer la fonction de lubrification, ce qui impose d’y ajouter de l’huile en
proportion non négligeable. On utilise typiquement deux types d’huile :
·
l’huile de ricin. C’est une huile végétale très performante qui résiste à très haute
température. Malheureusement elle a tendance à s’oxyder avec le temps et forme
une gomme difficile à éliminer, mais qui protège de la corrosion.
·
L’huile 2T synthétique. Cette
huile a la particularité d’être miscible avec le carburant. Elle est moins
chère que l’huile de ricin, plus stable dans le temps et ne forme pas de gomme,
ce qui lui permet dans certaines conditions de remplacer partiellement ou totalement
l’huile de ricin.
La composition
typique des carburants est donnée ci-après pour information seulement car il
est préférable d’utiliser un mélange du commerce réputé plutôt que de faire son
mélange soi-même. Ceci à cause de la difficulté à trouver certains composants
et à cause de la toxicité de certains d’entre eux, en particulier du méthanol
et de l’amyl-nitrate (utilisé dans
certains carburants américains pour autoallumage).
Moteurs à bougies à incandescence
Les carburants pour
moteurs glowplug utilisent les ingrédients suivants :
·
Huile : il s’agit en général d’un mélange d’huile de ricin et d’huile de
synthèse. Utiliser moins de 50 % d’huile de ricin est déconseillé car le
méthanol du mélange est très hygrophile et la protection anti-corrosion de
l’huile de ricin très importante. La proportion typique d’huile dans le
carburant est de 20 %, mais les moteurs 4T peuvent parfois se contenter de 15 %
alors que des moteurs très poussés peuvent exiger 25 %.
·
Nitrométhane : la composition chimique brute CH3NO2
du nitrométhane montre que ce composé apporte de l’oxygène. Il s’agit donc d’un
dopant qui permet d’augmenter la quantité de gaz de combustion produit et donc
accroître la puissance du moteur. La quantité normale de nitrométhane va de 5 %
à 15 % en fonction des performances désirées. Certains moteurs, notamment ceux
fabriqués dans les pays d’Europe de l’est sont prévus pour fonctionner sans
nitrométhane ; ils ont un taux de compression plus élevé à cet effet. A
l’inverse, certains moteurs d’hélicoptère ou très poussés peuvent accepter
jusqu’à 30 % de nitrométhane ; attention toutefois au stress imposé au
moteur à partir de 20 % de nitrométhane, car tous les moteurs ne le supportent
pas. Le nitrométhane est en général interdit en compétition. L’usage de 5 % de
nitrométhane dans le carburant de base (hors compétition) tient au fait que
cette proportion de nitrométhane rend le réglage de la carburation moins
critique et permet un ralenti plus lent et plus stable.
·
Méthanol : carburant proprement dit. Ce composé est très hygrophile, c'est-à-dire
qu’il absorbe spontanément l’humidité de l’air. Il faut toujours bien refermer
le bidon de carburant et l’ouvrir le moins possible. Une pompe à carburant à
demeure sur le bidon permet de limiter significativement le contact du méthanol
avec l’air extérieur et donc sa propension à absorber de l’humidité.
·
Anticorrosion : de nombreux carburants contiennent un
additif anti-corrosion en faible quantité pour améliorer la protection apportée
par l’huile de ricin.
·
Fongicide : l’addition d’un fongicide est parfois utilisé pour éviter le
développement d’algues avec le temps.
Moteurs à bougies à étincelles
Les moteurs à
bougies à étincelles sont en général de gros moteurs (25 cm3 et
plus) et se content de beaucoup moins d’huile. La composition typique est la
suivante :
·
Huile : on utilise en général 2,5 % à 5 % d’huile de synthèse de bonne qualité,
l’utilisation d’huile de ricin étant inutile.
·
Essence : le sans plomb 95 constitue les reste du mélange.
Moteurs à autoallumage
Les moteurs à
autoallumage utilisent un carburant à trois ou quatre composants :
•
Huile : pour la lubrification et l’étanchéité entre le piston et le cylindre.
L’huile préférée est l’huile de ricin pour ses propriétés anti-corrosion, mais
on peut parfaitement utiliser un mélange d’huile synthétique et d’huile de
ricin. La proportion idéale d’huile dans le mélange est de 25 %.
•
Pétrole : carburant proprement dit, il peut être remplacé par du gasoil (qui brûle
toutefois moins proprement) ou du kérosène. La proportion utilisée idéale est
de 43 %.
•
Ether : destiné à diminuer la température de la détonation (et donc le taux de
compression nécessaire) et à rendre miscible l’huile dans le pétrole. La
proportion idéale est de 30 %.
•
Iso-propyl nitrate : destiné à permettre de diminuer un peu le
taux de compression nécessaire à la détonation, et donc à augmenter la durée de
vie des moteurs. La proportion doit être de 2 %, mais comme c’est un
composant difficile à approvisionner, on pourra éventuellement s’en passer et
utiliser un peu plus de pétrole.
Comme le pétrole est
beaucoup plus énergétique que l’alcool méthylique des moteurs à glowplug, la
consommation est bien moindre, ce qui permet d’utiliser un réservoir plus
petit. L’inconvénient de ce carburant est l’odeur d’éther qui incommode
certains.
D’une façon générale
concernant les carburants on peut distinguer deux cas :
·
Utilisation
de méthanol dont l’énergie de combustion est de 19.7 MJ/kg et le rapport
stoechiométrique est de 6.42:1.
·
Utilisation de pétrole ou d’essence dont l’énergie de combustion est de 44,5
MJ/kg et le rapport stoechiométrique est de 14,7:1.
Donc avec le
méthanol il faudra 14,7/6.42 = 2,29 fois plus de carburant, ce qui peut poser
des problèmes si on adapte un moteur initialement à essence au méthanol car il
faut que le carburateur puisse délivrer le carburant supplémentaire. En
revanche, l’énergie par explosion avec du méthanol sera 2,29*19,7/44,5 = 1,01
fois plus élevée, donc équivalente. L’usage du méthanol devient finalement
avantageux du point de vue puissance grâce à l’addition de nitrométhane. Le
léger gain en passant du méthanol (sans nitrométhane) au pétrole (avec
autoallumage) s’explique par le meilleur rendement du moteur dans le second cas
lié à un taux de compression plus élevé.
La carburation et les réglages
Un moteur à
explosion ne fonctionne correctement qui si son mélange air/carburant est
proche de la stœchiométrie, c'est-à-dire qu’il y a juste assez d’oxygène pour
brûler tout le carburant. Un mélange riche (avec excès de carburant) diminue la
température de combustion à cause de l’évaporation du combustible en excès,
tandis qu’un mélange pauvre à tendance à provoquer une surchauffe. Lorsqu’on
s’écarte de plus de 20 % du mélange stœchiométrique, le moteur a tendance à
cafouiller puis à caler.
Le carburateur est
donc la pour permettre de régler la quantité d’air frais entrant tout en
ajoutant la bonne proportion de carburant. Le fonctionnement d’un carburateur
simplifié (voir figure 12) est simple :
·
Le
boisseau (cylindre percé 4) permet d’obstruer plus ou moins l’entrée d’air du
moteur en modifiant sa position angulaire, comme un robinet. Il règle donc la
quantité d’air aspiré par le moteur à chaque tour.
·
Le
passage de l’air dans le carburateur crée une dépression qui aspire le
carburant par le gicleur relié au réservoir via une durit.
·
L’aiguille
du gicleur 1 permet d’obstruer plus ou moins l’ouverture du gicleur et donc de
régler la proportion air/carburant.

Figure 12 : carburateur élémentaire
Tel quel, le
dispositif ne fonctionne pas correctement car la quantité de carburant aspirée
n’est pas proportionnelle à la quantité d’air. La proportion de carburant augmente
fortement lorsqu’on ferme le boisseau. Il faut donc appauvrir le mélange
lorsque le boisseau est fermé. Pour cela deux méthodes peuvent être
utilisées :
·
ajouter
de l’air par un orifice supplémentaire pour appauvrir le mélange boisseau
fermé,
·
diminuer
l’ouverture du gicleur à l’aide d’un contre-pointeau lorsque le boisseau se ferme.
La photo 21 montre
la première solution. Une petite ouverture réglable par une vis d’air de
ralenti permet de régler la richesse du mélange lorsque le boisseau est en
position de ralenti.
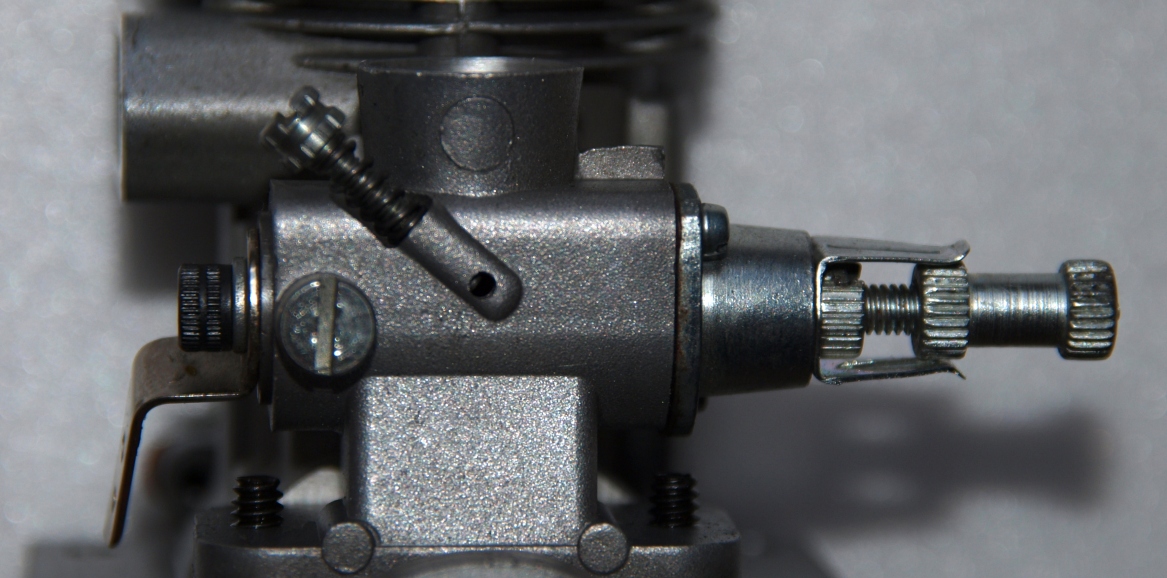
Photo 21 : carburateur FOX avec réglage de l’air au
ralenti
La figure 13 et la
photo 22 montrent la seconde solution. Le principe est un peu plus compliqué.
Dans cette solution le boisseau ne se déplace plus simplement en rotation, mais
en spirale, ce rapprochant du gicleur lorsqu’il se ferme. Il porte en son
centre l’aiguille du contre-pointeau 2 qui pénètre donc dans le gicleur
lorsqu’on diminue les gaz, ce qui a pour effet de diminuer l’arrivée de
carburant et donc la richesse du mélange.
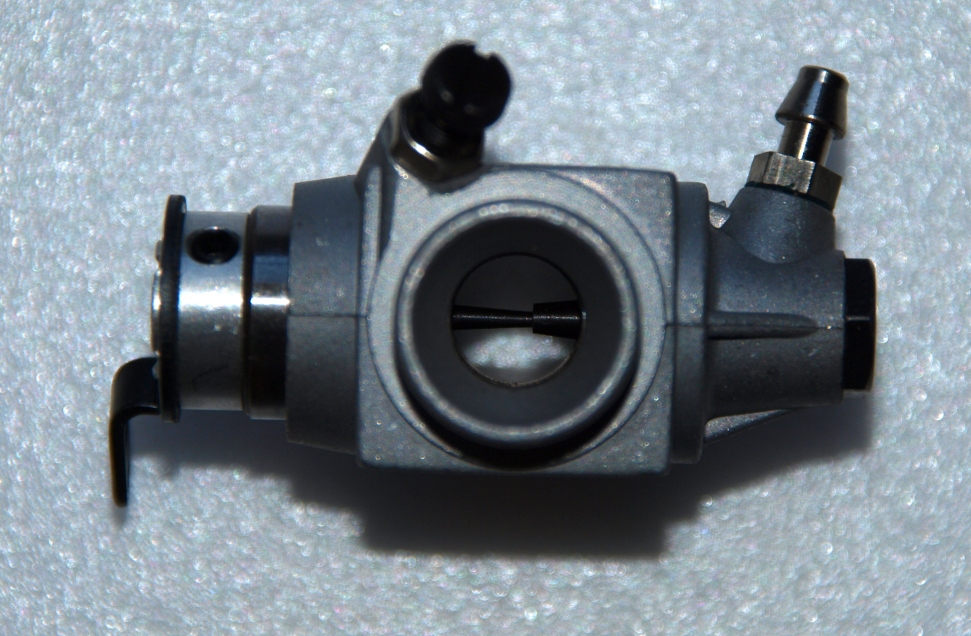

Figure 13 et photo
22 : carburateur avec réglage
de la richesse du ralenti par contre-pointeau
Noter dans la photo 22 la présence du
contre-pointeau visible dans le carburateur
La seconde méthode
est plus compliquée et donc plus coûteuse que la première, mais elle permet un
meilleur réglage de la richesse. Le réglage est aussi plus facile. La majorité
des moteurs utilisent donc des carburateurs de ce type.
Les carburateurs à
contre-pointeau constituent la grande majorité des carburateurs. Ils ne sont
pas pour autant parfaits. En effet, le tube du gicleur obstrue partiellement
l’arrivée d’air, ce qui limite la quantité de gaz qui peut entrer dans le moteur.
Aussi, la société autrichienne WEBRA [11] propose des
carburateurs à guillotine (figure 14 et photo 23) dans lesquels le boisseau
cylindrique est remplacé par un lame plate percée se déplaçant en translation
et où le gicleur est décalé latéralement afin de ne plus provoquer
d’obstruction. Ce type de carburateur augmente un peu la puissance du moteur et
améliore la qualité du mélange.
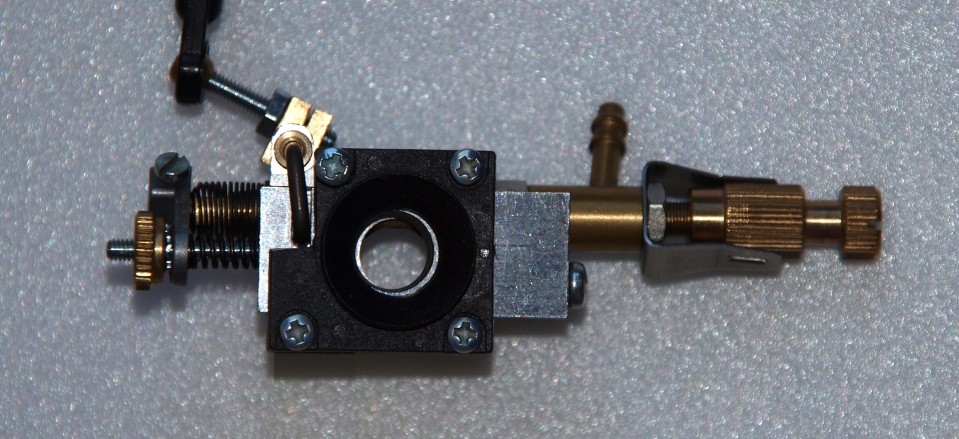

Figure 14 et photo
23 : carburateur à guillotine
fabriqué par la société WEBRA
Noter l’absence de contre-pointeau obstruant
Les carburateurs à
guillotine, malgré le progrès qu’ils représentent, ne sont pas non plus
parfaits. Il subsiste une série de problèmes listés ci-après par ordre
d’importance décroissante :
·
tout
changement d’attitude de l’aéromodèle change la hauteur du carburant par
rapport au carburateur et donc la richesse,
·
lorsque
le réservoir se vide le niveau baisse et le mélange s’appauvrit,
·
tout
changement de température entraîne un changement de viscosité et donc de
richesse,
La variation de la
pression d’arrivée du carburant étant la cause majeure des irrégularités de la
carburation, de nombreux moteurs de plus de 10 cm3 sont équipés d’un
régulateur de pression (photo 24) précédé d’une pompe. Les gros moteurs 2T à
essence dérivés des outils de jardin sont d’ailleurs systématiquement pourvus
de ces accessoires inclus dans leur carburateur Walbro (photo 25).
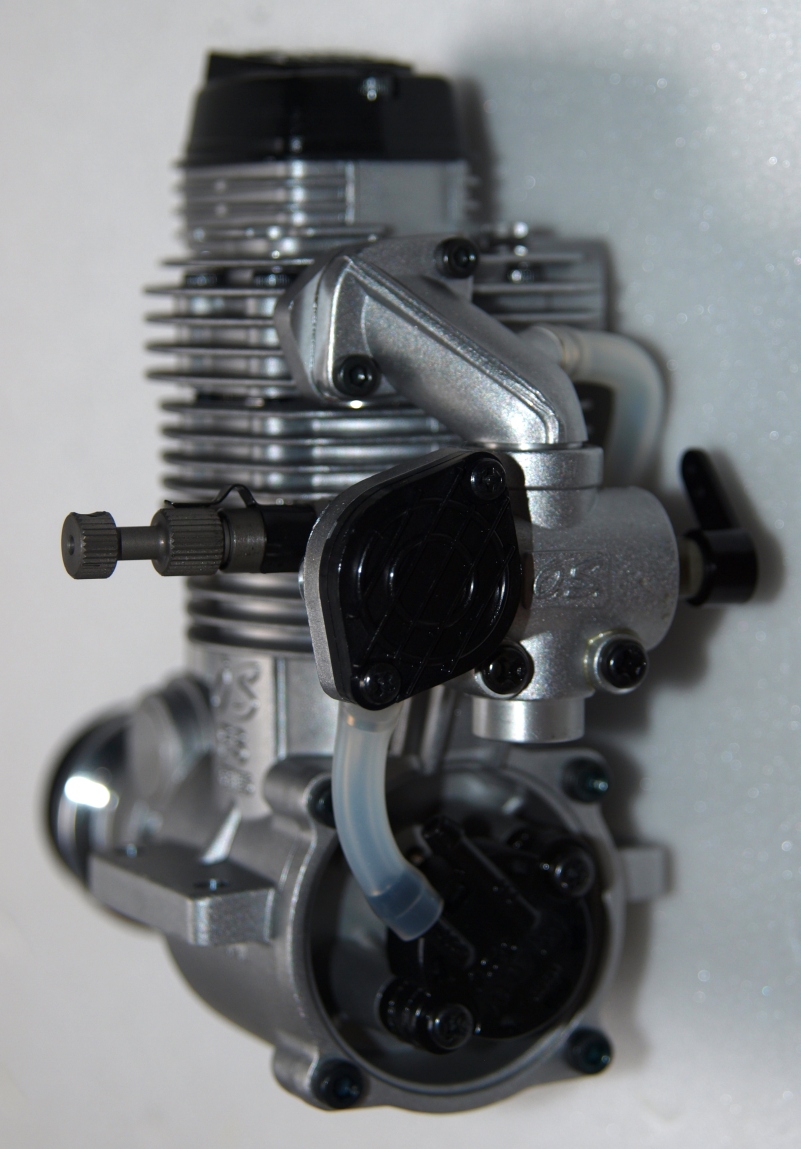
Photo 24 : moteur OS SURPASS 91 à pompe Photo 25 : moteur ZENOAH à
carburateur à pompe Walbro (photo Weymuller)
Hormis les très gros
moteurs, la majorité des carburateurs doivent être réglés. Il y a donc quelques
petites astuces à connaître.
·
Le
réglage de la richesse à plein gaz doit se faire en tournant d’abord l’aiguille
du gicleur jusqu’à obtenir le régime maximum (son le plus aigu). On est alors
légèrement pauvre, on ouvre donc alors le gicleur d’environ 20° à 30°.
·
Le
réglage de richesse du ralenti doit se faire en deux temps répétés. D’abord
réglage de la richesse à plein gaz, puis de la richesse au ralenti en cherchant
le régime maximal à l’aide de la vis d’air ou de carburant (selon le type de
carburateur). L’opération doit être répétée deux ou trois fois. Le contrôle se
fait ensuite de la façon suivante : si lors de la mise de gaz
l’accélération est molle et que l’échappement laisse sortir un brouillard
blanchâtre, le ralenti est trop riche ; si à la mise de gaz le moteur
hésite ou cale, le ralenti est trop pauvre.
·
Après le
réglage initial toujours vérifier que le moteur fonctionne à toutes les
attitudes de vol, car il peut devenir trop pauvre et caler lors des montées en
chandelle, ou au contraire devenir trop riche en piqué.
·
Il peut
être astucieux d’être un poil riche en début de vol, car au fur et à mesure que
le niveau du carburant descend dans le réservoir le mélange s’appauvrit.
·
Il faut
éviter de carburer pauvre car la surchauffe peut endommager le moteur. Ce point
est particulièrement critique avec le moteur Wankel de OS.
L’échappement
La fonction de
l’échappement est plus complexe qu’il y paraît. Si la fonction initiale
évidente est la diminution du bruit, l’échappement a aussi d’autres fonctions
secondaires importantes :
·
freiner
la sortie des gaz d’échappement pour stabiliser le ralenti,
·
pressuriser
le réservoir de carburant afin de minimiser l’effet des variations de niveau de
carburant et de changement d’attitude sur la carburation,
·
canaliser
les rejets d’huile de ricin,
·
protéger
le cylindre des entrées d’impuretés.
Deux solutions
s’offrent au modéliste :
·
le
silencieux classique et compact plus ou moins efficace selon qu’il a une ou
deux chambres (photo 26),
·
le
résonateur dont le fonctionnement est présenté à la figure 11 et qui permet
d’augmenter la puissance.
Les résonateurs ne fonctionnent qu’avec les 2T. Ils permettent de gagner jusqu’à 20 % de puissance, mais à un seul régime, ce qui est surtout intéressant en compétition. Si on veut utiliser un résonateur et le choisir ou le faire soi-même, Martin Hepperle, toujours lui, propose le logiciel libre JavaPipe [12] pour le dimensionnement.

Photo 26 : échappement à deux chambres avec prise de
pressurisation du réservoir
Démarrage et sécurité
Selon son sens de
l’humour, sa position au sein de son club, selon qu’on a toujours ou non besoin
de tous ces doigts, selon qu’on souhaite ou non d’augmenter le nombre de pages
du magazine de notre fédération, la position vis-à-vis de la sécurité peut
changer drastiquement. Voici ci-après une position qui en vaut bien une
autre :
·
Inutile
d’utiliser un démarreur électrique, tous les moteurs démarrent parfaitement à
la main, on n’aura donc jamais besoin de cet accessoire.
·
Si on
s’obstine à vouloir démarrer à la main, inutile d’utiliser un bâton, ça fera
rire les copains au premier retour d’hélice et plaisir au médecin qui facturera
les points de suture.
·
Se
contenter de fixer l’aéromodèle sommairement au sol, ou ne pas le fixer du
tout, comme ça il aura aussi sa change de pouvoir se balader un peu. Attention
quand même, si vous êtres marié, à l’hélice qui déchire les bas de pantalon et
au sang qui tâche les mêmes bas de pantalon. Ça déplait en général aux épouses.
Quelques autres
conseils :
·
Pour
démarrer, le moteur à besoin de vapeurs de carburant dans le cylindre avant
toute tentative. Il faut donc en injecter un peu à l’aide d’une pipette, ou
provoquer une forte aspiration en bouchant l’entrée d’air du carburateur puis
en tournant énergiquement l’hélice de quelques tours (généralement trois tours
à froid et un tour à chaud).
·
Un
moteur, surtout lorsque le cylindre n’est pas orienté vers le haut peut accumuler
du carburant ou de l’huile. Il faut donc toujours le faire tourner à la main,
bougie coupée, pour vérifier qu’il n’y a pas de blocage hydraulique avant
d’utiliser un démarreur électrique.
·
En
raison de leur forte compression, il est assez risqué de démarrer un moteur à
autoallumage au démarreur électrique. Avec eux, il vaut mieux démarrer à la
main en utilisant un bâton tendre ou enrobé de caoutchouc.
·
Le
moteur démarre plus facilement lorsqu’il carbure riche. Il est donc préférable
avant le démarrage d’ouvrir l’aiguille du gicleur d’un demi-tour au-delà du
réglage optimal.
·
Lorsqu’on
entend un chuintement au branchement de la bougie, c’est qu’elle est noyée. Il
faut alors attendre que tout le carburant soit brûlé avant de tenter un
démarrage.
·
Dès que
le moteur tourne à régime intermédiaire couper l’alimentation de la bougie.
Laisser tourner le moteur plein gaz avec la bougie sous tension provoque une
surchauffe du filament qui diminue la durée de vie de la bougie.
Rodage
Les outils d’usinage
laissent des traces et des résidus microscopiques plus ou moins adhérents lors
de la fabrication. Il faut donc les faire disparaître lors des premières
utilisations en pratiquant ce qu’on appelle le rodage.
Le besoin de rodage
dépend de la technique d’usinage utilisée et des matériaux. La technique de
rodage est aussi fonction du type de moteur. De plus, chaque fabricant, voire
chaque modéliste a sa technique. Le mieux est donc de se référer pour chaque
moteur à sa notice. Ne vont donc être donné ici que quelques règles très
générales :
·
Un
rodage demande au moins deux réservoirs (d’environ 15 mn) au sol et de deux
réservoirs en l’air.
·
Les
moteurs à tolérance fine (acier/fonte, ABC, ABN…) demandent moins de rodage que
les autres.
·
Lors du
rodage, le moteur doit être peu chargé, ce qui implique d’utiliser une hélice à
moindre pas ou ne jamais complètement ouvrir le carburateur.
·
Le
rodage se fait nettement mieux si le régime bascule régulièrement entre deux
régimes différents (à un rythme qui peut être aussi serré que quinze secondes).
·
Durant
le rodage il faut carburer riche (en faisant varier la richesse) pour apporter
plus de lubrifiant et limiter l’échauffement.
·
La règle précédente ne s’applique pas aux
moteurs de type ABC et ABN qui ont
tendance à serrer à faible température. Il faut toujours les roder à la
richesse proche de l’optimale, c'est-à-dire celle de richesse du régime maxi
plus 20° à 30° d’ouverture du gicleur.
Le démontage et l’entretien
Les moteurs
demandent un minimum d’entretien pour durer sans donner de soucis, ce qui
impose parfois un démontage partiel.
L’action minimale, et la plus importante,
consiste après le dernier vol de la journée et après avoir grossièrement vidé
le réservoir à faire tourner le moteur jusqu’à extinction pour éliminer tout
reste de carburant. Ceci vaut aussi pour les moteurs d’outillage de jardin. Les
raisons sont les suivantes :
·
Dans le
cas des moteurs à méthanol, l’hygrophylie du carburant provoque de la corrosion
s’il en reste dans le moteur.
·
Dans le
cas d’utilisation d’huile de ricin, son oxydation provoque l’apparition de
gomme difficile à retirer et qui peut bloquer certaines pièces en mouvement.
·
Les
résidus d’huile (de ricin ou synthétique) ont tendance à colmater des zones
critiques du carburateur ce qui finit par entraîner un mauvais fonctionnement.
·
Quelque
soit le carburant, il attaque toujours plus ou moins les durits et joints, ce
qui finit par poser des problèmes.
Une preuve d’égard
supplémentaire pour le moteur consiste à ajouter un peu d’huile de vaseline par
les orifices en le faisant tourner à la main car ça provoque l’apparition d’un
film protecteur. Le choix de l’huile est important car de nombreuses huiles ne
donnent pas satisfaction, notamment certaines huiles 3 en 1, car soit elles
s’évaporent, soit elles forment un dépôt. L’huile de vaseline toute simple est
la moins chère et donne les meilleurs résultats.
De temps en temps il
faut vérifier le serrage des vis car le moteur vibre énormément, on en profite
pour vérifier qu’il n’apparaît pas de jeu (usure anormale) au niveau de l’axe
de l’hélice et du boisseau du carburateur.
En fin de saison, le
stockage du moteur dans un endroit sec (pas le garage ou la cave humide) imbibé
d’huile de vaseline est une nécessité si on veut pouvoir le réutiliser la
saison suivante.
Au moins une fois
par saison il est utile de décalaminer le moteur (ou au moins vérifier si c’est
utile) en démontant la culasse à l’aide d’un tournevis adapté (il doit
parfaitement s’adapter aux têtes des vis, à moins qu’on ait un grand stock de
vis d’avance). Si c’est un quatre temps, un contrôle du jeu des culbuteurs sera
aussi le bienvenu. Si le moteur est assez facilement démontable de
l’aéromodèle, un contrôle du bas moteur en enlevant le bouchon de carter
permettra de contrôler qu’aucun jeu anormal à la bielle ni oxydation ne sont
apparues.
N. B. :
Si on démonte il faut prendre le maximum de précautions pour ne pas
abîmer les joints. De plus, les joints de culasse en cuivre doivent être trempés
avant d’être réutilisés. Le trempage consiste à chauffer le joint au rouge très
sombre sur une gazinière ou une autre source de flamme puis à le jeter dans
l’eau. Ça lui redonne son élasticité.
Certains démontent
de temps en temps complètement leur moteur pour tout vérifier. Les
constructeurs n’aiment pas ça car les modélistes utilisent souvent de mauvais
outils, de mauvaises méthodes et abîment les pièces. Il faut savoir que les
roulements et la chemise de cylindre sont montés serrés et qu’il faut avoir la
bonne technique et les bons outils pour les démonter. De plus du fait du
rodage, remonter certaines pièces symétriques à l’envers (piston, cylindre,
bielle…) peut dégrader le fonctionnement. Cette opération est donc à laisser
aux pros.
Choix du moteur
Choisir un moteur signifie choisir son type, ça c’est selon le goût de chacun ; mais aussi sa taille (puissance), ça c’est l’objet de ce paragraphe.
On a vu que l’on définit typiquement deux points de fonctionnement pour un modèle : la vitesse maximum en palier et la force de traction nécessaire en montée à vitesse plus réduite. Comme le moteur ralentit d’autant plus qu’on lui demande un effort important et que le recul de l’hélice augmente dans les mêmes conditions, il faut admettre une différence de vitesse d’autant plus grande entre montée à vitesse réduite et vol en palier que l’angle de montée désiré est important. Cette différence dépend de plus du type de moteur : 2T, 4T ou électrique. Elle est maximum avec un 2T et minimum avec un moteur électrique.
Nous allons ici simplement esquisser une méthode pour trouver la puissance du moteur, puis choisir les vitesses et l’hélice.
Le choix de la puissance du moteur se fait en étudiant le cas de la montée à vitesse réduite. On calcule dans ce cas la puissance nécessaire de montée Pu = Vm*Ft, on divise par le rendement η estimé de l’hélice et par le facteur de puissance f du moteur (puissance au régime de montée divisé par la puissance maximale) pour obtenir une puissance estimée et donc un choix de moteur (équation 13).
![]() (13)
(13)
Exemple : notre « mini F3A » sous la force de traction Ft de 22,5 N
Dans le cas d’un moteur 2T (moteur rapide) il faut accepter un fort ralentissement du moteur sous l’effort maximal pour que le moteur ne tourne pas trop vite ensuite en palier. Typiquement on admet un régime de montée égal à 80 % du régime de puissance maximale. Ceci donne dans notre cas un facteur de puissance f = 880W/800W = 0,9 (voir figure 7). La vitesse de montée choisie au début du chapitre est Vm = 69/3,6 = 19 m/s (69 km/h) et le rendement de l’hélice peut être estimé à η = 0,6 (voir figure 2).
On en déduit Pm = 19x22,5/736x0,9x0,6 = 1,07 CV. Le moteur OS MAX-32SX qui donne 1,2 CV à 18000 tr/mn et qui pèse 270 g est un peu trop puissant mais peut convenir malgré tout.
Dans le cas d’un moteur 4T (moteur lent) on peut se permettre de faire tourner le moteur à plein régime en montée car il n’y a pas de problème de surrégime, ceci nous permet de prendre f = 1.
On en déduit Pm = 19x22,5/736x1x0,6 = 0,96 CV. Le moteur OS MAX-FS52S qui donne 0,9 CV à 12000 tr/mn et qui pèse 402 g est un peu juste, mais devrait tout de même faire l’affaire si on ne se montre pas trop exigeant.
Les moteurs de collection et hors norme
Histoire sans parole, juste pour le plaisir des yeux








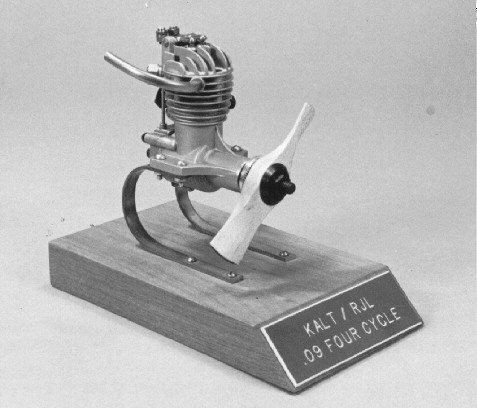



Photos 27 à 39 : divers moteurs anciens (source principale MECOA [13])
Bizarreries



Photos 40 à 42 : moteurs hors norme (source Wikipédia)
Variations autour de 1 cm3 chez Valentine (N. B. : les pièces ne représentent pas les prix qui dépassent les 1000 € aux enchères…)
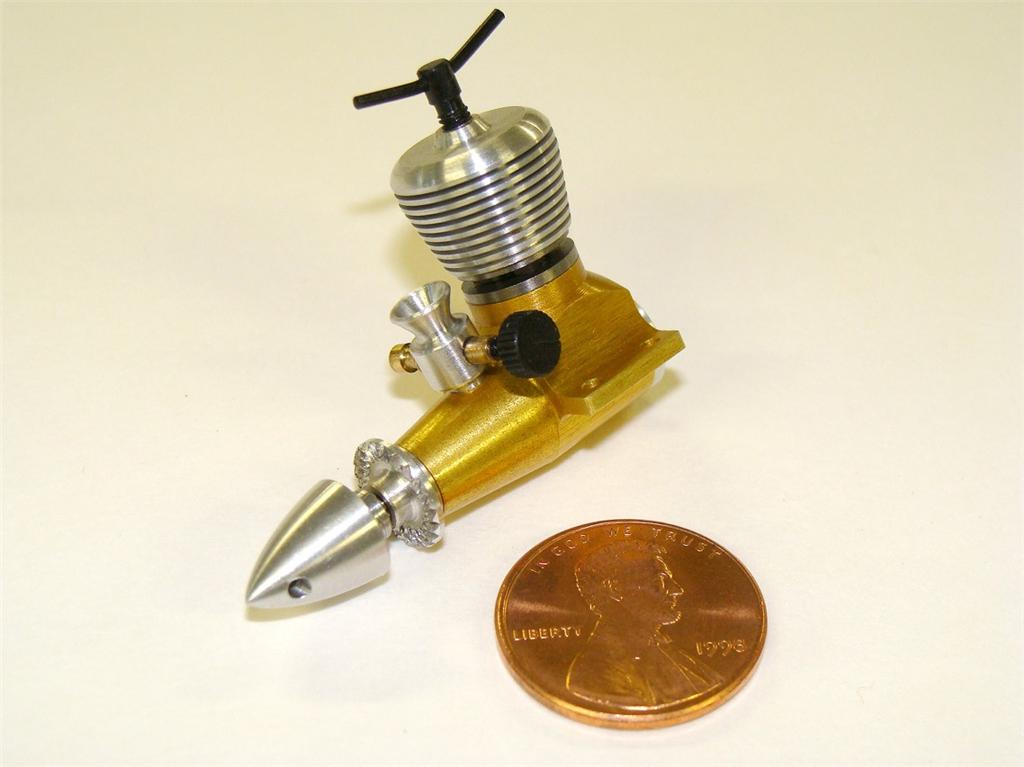
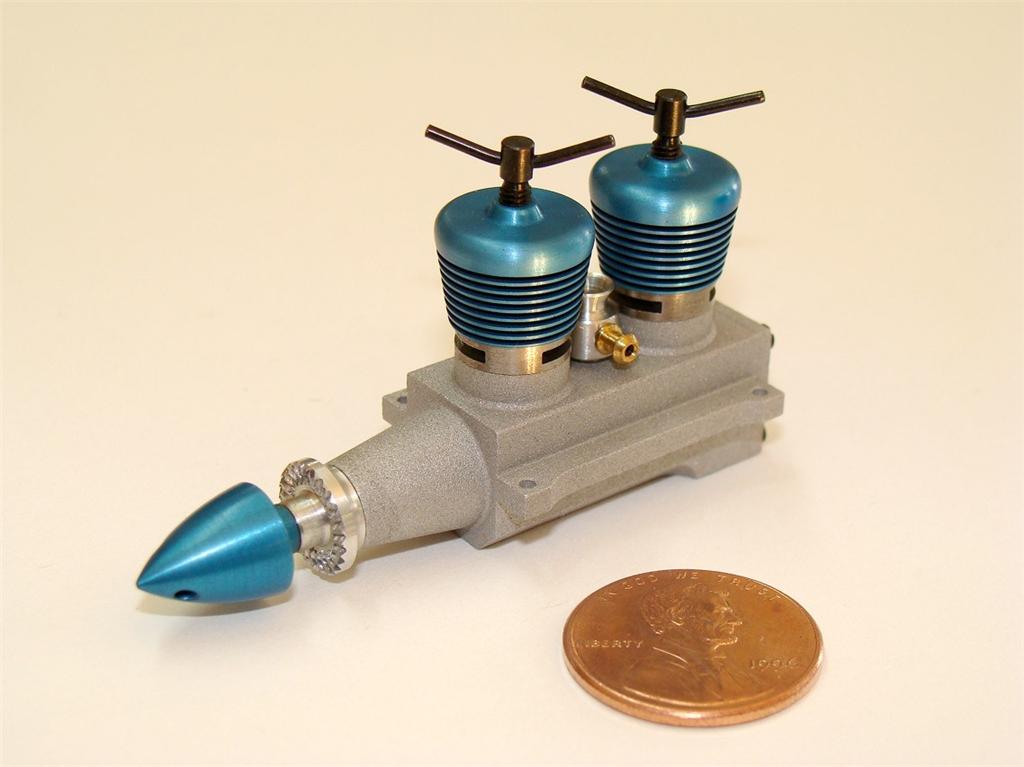
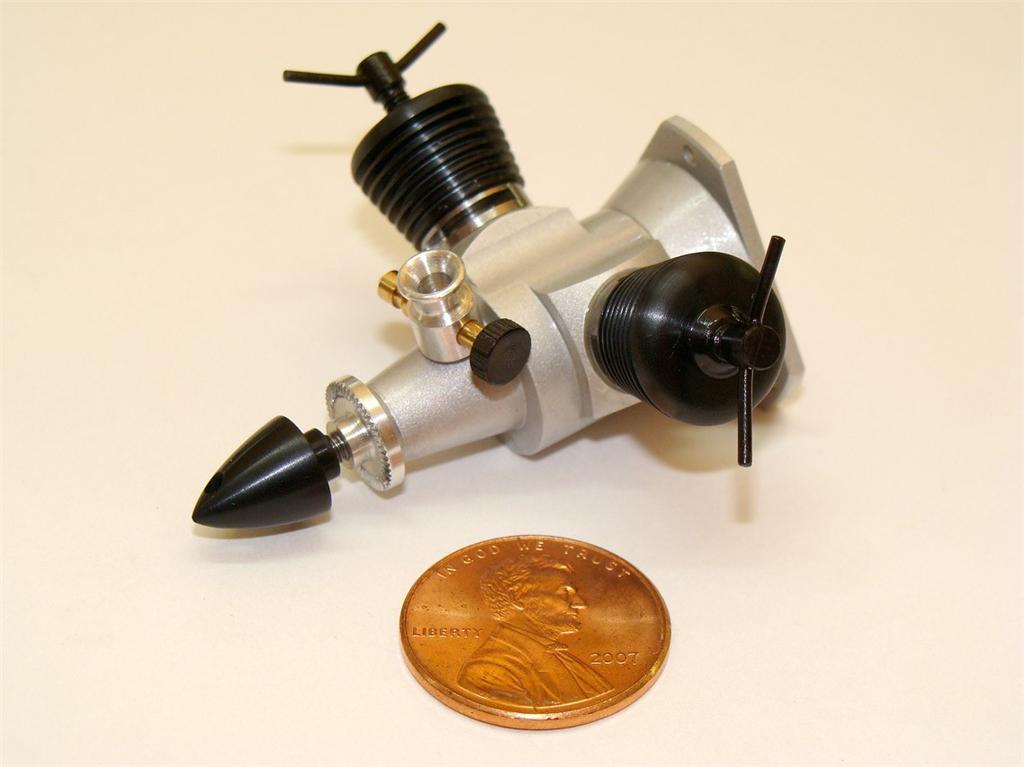


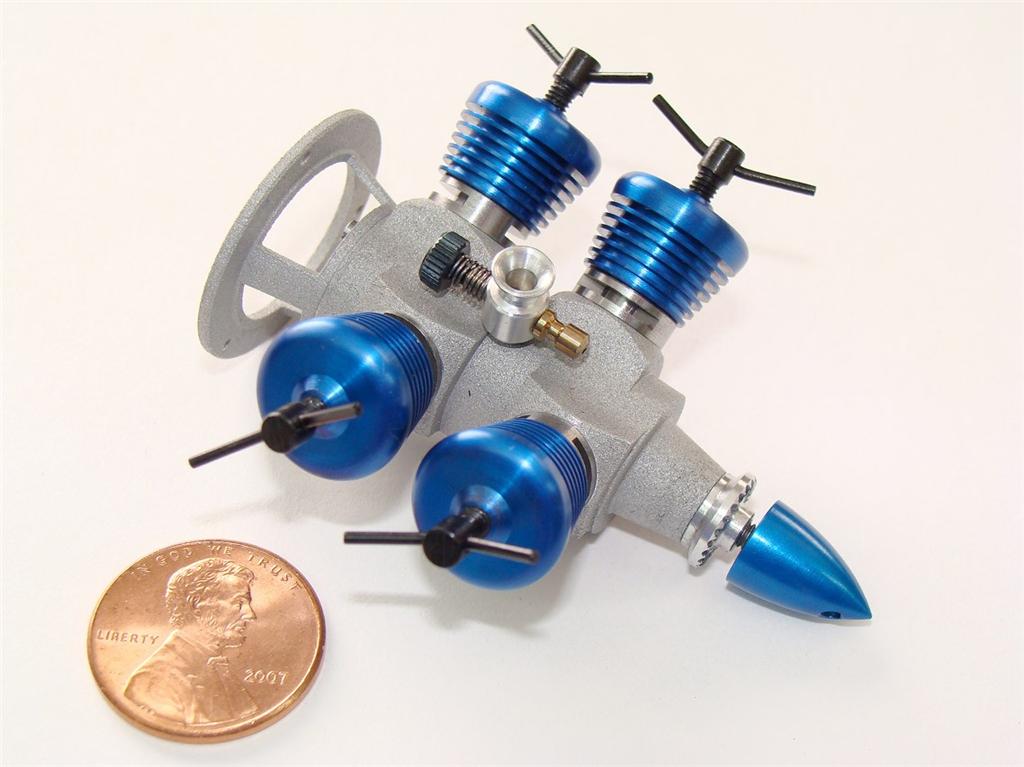
Photos 43 à 49 : moteurs à cylindres de 1 cm3 (source internet)
Adaptation à l’hélice et au modèle
L’hélice se choisit en deux phases, de préférence d’abord le pas en prenant en compte la vitesse maximale en palier, puis le diamètre en prenant en compte la traction maximale en montée.
Dans le cas de notre « mini-F3A », la vitesse maximale initiale retenue est de 3,5 fois la vitesse de décrochage, soit 27x3,5 = 95 km/h (26 m/s), mais on prendra un peu plus, soit 4 fois dans le cas du moteur 2T à cause du ralentissement à prévoir en montée. Ceci nous conduit à une vitesse maximale de 27x4 = 110 km/h (30 m/s) dans le cas du moteur 2T.
Pour trouver le pas, il suffit maintenant d’utiliser l’équation 11 en prenant un recul de 10 % et en acceptant un surrégime de 1000 tr/mn par rapport au régime de puissance maximale.
Moteur 2T
![]()
Comme les hélices de 4,1" n’existent pas, on est obligé de choisir un pas de 4".
Moteur 4T
![]()
De la même façon, comme les hélices de 5,3" n’existent pas, on est donc obligé de prendre un pas de 5", à moins d’utiliser une hélice VARIOPROP.
Pour le choix du diamètre, on sait qu’il faut une hélice d’un diamètre tel qu’elle fournisse la traction attendue à la vitesse prédéterminée.
Moteur 2T
L’observation de la courbe de puissance caractéristique d’une hélice de 12,5"x4" montre que cette hélice n’absorbe qu’environ 600 W à 14500 tr/mn, (régime choisi de 0,8 fois le régime de puissance maximale) alors que le moteur fournit 800 W à ce régime. Le moteur va donc tourner plus vite car il est surdimensionné, à moins d’adopter une hélice plus grande. Comme il y a très peu de choix dans les hélices plus grandes, acceptons le surrégime.
L’équilibre s’établit aux environs de 15400 tr/mn comme le montrent les courbes de traction de la figure 16 et de puissance de la figure 15 réalisées à l’aide de JavaProp. A 15400 tr/mn l’hélice fournit les 22,5 N demandés à 19 m/s en absorbant exactement la puissance de 850 W du moteur. Le choix du diamètre est donc parfait.
La difficulté de la méthode réside dans le fait qu’il faut trouver simultanément le régime de rotation et le diamètre de l’hélice qui en fournissant la force de traction désirée absorbent juste la puissance du moteur au régime considéré.
Pour y arriver, on choisit une hélice du pas calculé au préalable et d’un diamètre existant paraissant adapté. On trace ensuite les caractéristiques de puissance et traction de cette hélice au régime choisi, soit à partir des courbes réduites des figures 2 à 4, soit directement à partir de JavaProp. De la, sur la courbe de traction on repère la vitesse qui fournit la traction retenue (22,5 N dans notre exemple), puis sur la courbe de puissance on repère la puissance absorbée correspondante à cette vitesse. Si elle est inférieure à la puissance du moteur au même régime, c’est que l’hélice va plus vite, sinon c’est le contraire. On recommence donc en modifiant le régime de rotation dans le sens qui convient jusqu’à ce que la puissance à l’hélice égale celle du moteur. Une fois l’équilibre trouvé, on note la vitesse obtenue. Si on n’est pas satisfait du résultat (vitesse trop élevée ou faible) on recommence avec d’autres diamètres d’hélice. En principe, le bon choix est trouvé assez vite car quand on passe d’une taille d’hélice à la taille directement voisine dans un sens ou dans l’autre, la traction change en général de plus de 30 %.
Si pour tous les choix d’hélice raisonnablement possibles, les vitesses restent trop basses ou trop élevées, il faut changer de moteur ou revoir ses exigences de vitesse. D’une façon générale, il ne faut pas être trop exigeant sur la vitesse de montée. Le minimum acceptable est 1,5 fois la vitesse de décrochage pour des questions de pilotage. Deux fois la vitesse de décrochage est déjà une bonne vitesse si le taux de montée est important. Par ailleurs, il faut que la vitesse maximum choisie soit d’autant plus supérieure à la vitesse de montée que le taux de montée demandé est important (comme cela a déjà été écrit).

Figure 15 : puissance absorbée par une hélice 12,5"x4" à 15400 tr/mn

Figure 16 : traction fournie par une hélice 12,5"x4" à 15400 tr/mn
Notre arrangement : moteur OS MAX-32-SX avec hélice 12,5"x4" est parfait puisqu’il donne exactement les vitesses demandées. On remarquera simplement que l’hélice tourne plus vite que prévu. Accessoirement, on pourra remarquer que l’hélice à très faible pas est presque une hélice de 3D.
Moteur 4T
L’observation de la courbe de puissance caractéristique d’une hélice de 12,5"x5" montre que cette hélice absorbe 600 W à 12000 tr/mn, alors que le moteur fournit 0,9 CV, soit 660 W. Il entraîne donc notre hélice de 12,5"x5" à un peu plus de 12000 tr/mn. L’équilibre s’établit cette fois à 12500 tr/mn (donc en léger surrégime) et l’hélice fournit alors 22,5 N à 13 m/s (47 km/h). La vitesse de montée de 13 m/s est nettement inférieure à celle de 19 m/s visée mais suffisante par rapport à la vitesse de décrochage. Comme le choix d’hélice est limité on est obligé de retenir l’hélice de 12,5"x5" et s’accommoder de la montée plus lente, à moins d’utiliser une hélice VARIOPROP car il serait alors possible de faire coïncider exactement le régime de montée avec le régime de puissance maximale du moteur. On pourrait aussi prendre un moteur de taille supérieure.
Bilan de masse
Une fois le moteur choisi, un bilan de masse s’impose. Il est indispensable pour le chapitre « construction » qui utilise les masses pour la définition des modèles.
Le tableau 3 donne ce bilan pour les deux moteurs retenus. On remarquera que la différence de consommation a été prise en compte. Pour la fin de vol, on a estimé que les réservoirs contenaient 25 % de carburant résiduel. Le tableau fait ressortir que contrairement à certaines idées reçues, le 4T n’est pas beaucoup plus lourd que le 2T. Il met aussi en évidence que dans un avion de 2 kg, une motorisation thermique prend environ 600 à 800 g, c'est-à-dire un tiers de la masse totale.
|
|
32-SX |
FS-52S |
|
Moteur |
270 g |
402 g |
|
Échappement |
50 g |
45 g |
|
Hélice + cône |
45 g |
45 g |
|
Support |
50 g |
50 g |
|
Réservoir |
70 g |
50 g |
|
Carburant |
270 g |
200 g |
|
Servo de commande |
40 g |
40 g |
|
Total début de vol |
795 g |
832 g |
|
Total fin de vol |
593 g |
682 g |
Tableau 3 : comparaison de masse d’une propulsion 2T avec une 4T
Les turbines − turboréacteurs dans le monde de l’aviation grandeur −
sont universellement utilisées dans ce contexte pour les avions de chasse et de
ligne, mais elles ne sont entrées que relativement récemment dans l’univers de
l’aéromodélisme. On peut distinguer deux types de propulsions à turbines :
·
Les
turbines à entraînement électrique (EDF en anglais pour Electric Ducted Fan)
pour aéromodèles de dimensions ordinaires (masses de 500 g à 2 kg), à la portée
de tous les modélistes un peu expérimentés. Ces turbines se comportent comme
des petites hélices rapides entraînées par des moteurs électriques. Ce cas peu
différent de la propulsion à hélice classique est donc traité dans le
paragraphe de la propulsion électrique.
·
Les
turbines à gaz dérivées directement des turboréacteurs de l’aviation grandeur. Ce
matériel est très coûteux (les prix s’expriment en milliers d’euros) et prévu
typiquement pour des très gros modèles (typiquement de 7 kg à 25 kg). Les
modèles à turbine à gaz imposent donc un très grand terrain d’aéromodélisme et
aussi beaucoup d’expérience car de plus leur vitesse est très élevée. Elle est
classiquement de 200 km/h, mais peut atteindre 500 km/h. Il s’agit donc d’un
type de propulsion réservé à une élite (dont l’auteur de ces lignes ne fait pas
partie). Ceci étant, comme à toute règle il y a des exceptions, il existe
maintenant des systèmes de propulsion à turbine à gaz de moins de 800 g [14] (photo 50) tous pleins faits pour des modèles de 2 kg à
3 kg.

Photo 50 : plus petite
turbine à gaz du monde de masse 210 g (commercialisée à plus de 15 € le
gramme…)
Principe de fonctionnement et comportement d’une turbine à gaz
Les cycle thermodynamique d’une turbine à gaz est similaire à celui d’un
moteur à explosion, à savoir :
·
compression,
·
inflammation du mélange air comprimé/carburant,
·
détente du gaz de combustion avec récupération de
l’énergie,
·
évacuation des gaz brûlés.
La différence principale tient au fait que dans une turbine à gaz les
quatre phases sont exécutées en continu en des lieux différents de la turbine
au lieu de successivement dans un moteur à explosion.

Figure 17 : turbine à gaz à
compresseur centrifuge (source Wikipédia)
La figure 17 montre une turbine gaz simple flux à compresseur centrifuge
du type de celles utilisées en aéromodélisme. Chaque étape thermodynamique est
visible sur le schéma. L’air entre dans la turbine par l’avant (la gauche) et
comprime l’air grâce au compresseur centrifuge. Une fois comprimé, l’air est
injecté dans la chambre de combustion annulaire en même temps que le
combustible et enflammé. Le gaz dilaté par la chaleur de la combustion est
fortement accéléré vers l’arrière et éjecté à forte vitesse par la tuyère.
Entre temps, les gaz de combustion sont passés à travers la turbine qui
entraîne le compresseur en prélevant un peu d’énergie dans le flux de gaz à
haute température. Attention, la figure 17 montre une turbine axiale à trois
étages, ce qui est incorrect car un seul étage suffit toujours. Les turbines
peuvent avoir diverses architectures, celle présentée à la figure 17 est aussi
celle des premières turbines anglo-américaines développées durant la seconde
guerre mondiale et qui a été reprise juste après la guerre par l’URSS pour
motoriser le MIG15, premier chasseur soviétique à réaction. En raison de sa
simplicité cette architecture est toujours très utilisée pour les micro
turbines en tous genres.
Quelques chiffres permettent de préciser un peu les conditions de
fonctionnement. La vitesse en bout des pales du compresseur est transsonique (≈
330 m/s) afin d’obtenir un rapport de
pression suffisant, en général de l’ordre de 4. La température des gaz de
combustion est limitée aux environs d’un maximum de 700 °C par un fort excès
d’air afin de ne pas détruire les pales de la turbine. Les gaz s’échappent par
un col sonique. Un col sonique est formé par convergent suivi d’un divergent
avec un passage du gaz à la vitesse du son au niveau du col. Cet arrangement
particulier permet d’obtenir des vitesses supersoniques. En effet, en amont du
col les gaz sont accélérés par la diminution de la section, mais dès qu’on est
à vitesse supersonique, c’est l’élargissement de la section qui provoque une
accélération en même temps qu’une détente du gaz. En sortie du réacteur, la
pression est à nouveau celle de l’atmosphère grâce à la détente du divergent et
la vitesse des gaz est de l’ordre de 1650 km/h, donc largement supersonique.

Photo 51 : éclaté d’une
turbine à gaz JetCat [15]. Noter à l’extrême gauche le
moteur électrique de
démarrage et en bas au centre gauche les
thermocouples de mesure de température des gaz pour la régulation.
La photo 51 permet d’avoir un aperçu des composants d’une turbine à gaz.
La partie haute montre le compresseur et sa turbine d’entraînement reliés par
un axe commun. Au centre gauche on voit le moteur électrique de démarrage et au
centre droit on voit le stator de la turbine suivi du cône du convergent
sonique. En bas de la photo 51 on voit de gauche à droite : le redresseur
de flux du compresseur centrifuge, les thermocouples de mesure de la
température des gaz qui servent à l’unité électronique de contrôle (ECU) pour
régler le débit de kérosène suivi par la chambre de combustion annulaire.
La photo 52 montre une turbine à gaz déshabillée qui met bien en évidence
le compresseur centrifuge et la chambre de combustion. La photo 53 permet quant
à elle de faire directement le lien entre la figure 17 et une turbine réelle.
Noter que la différence la plus visible tient dans la forme de la chambre de
combustion. En effet l’air fortement ralenti par l’augmentation de la
section y rentre radialement de
l’extérieur comme de l’intérieur par les trous circulaires en formant des
tourbillons. Cette disposition est nécessaire pour stabiliser le front de
flamme.


Photo 52 : turbine Olympus AMT
[16] décapotée
Photo 53 : coupe d’une turbine Olympus de AMT
Il existe une variante de l’arrangement de la figure 17 présentée à la
figure 18, uniquement à titre d’information puisqu’on ne retrouve pas cet
arrangement en modélisme.
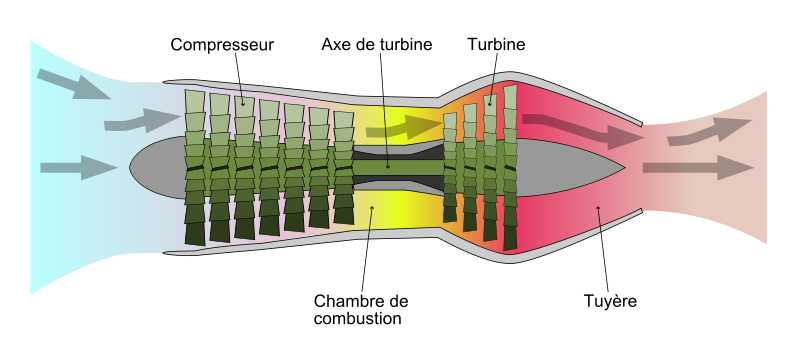
Figure 18 : turbine à gaz à
compresseur axial (source Wikipédia)
Dans la figure 18, un compresseur axial remplace le compresseur
centrifuge. Il faut au moins sept étages successifs de compression pour obtenir
un rapport de pression suffisant, mais le rendement de ce type de compresseur
est meilleur que celui du compresseur centrifuge. C’était l’arrangement utilisé
pour les réacteurs nazis durant la seconde guerre mondiale et repris par la
SNECMA (avec les ingénieurs allemands correspondants…) pour les réacteurs de la
famille ATAR de nos avions de chasse jusqu’au Mirage III inclus.
Les réacteurs utilisant les dispositions des figures 17 et 18 étant
affectés par une très forte consommation spécifique, on préfère aujourd’hui en
aviation grandeur utiliser l’arrangement plus compliqué de la figure 19. C’est
la configuration utilisée par tous les avions de chasse et de ligne actuels.

Figure 19 : turbine à gaz à
double flux utilisée en aviation grandeur (source Wikipédia)
Dans la configuration de la figure 19 nommée « double flux » un
second ensemble compresseur/turbine permet d’accélérer un flux d’air non brûlé dit
secondaire qui peut atteindre 20 fois le flux d’air primaire servant à la
combustion. De plus, le rapport de pression beaucoup plus élevé dans ce cas
peut atteindre 40. L’augmentation de la quantité d’air accéléré associé au très
fort rapport de pression permet d’obtenir un rendement global de l’ordre de 45
% dans le cas des avions de ligne, double de celui d’un moteur à explosion.
Ceci permet à nos avions de transport de maintenir la consommation kilométrique
par passager en dessous de celle des voitures, malgré une vitesse de croisière
d’environ 850 km/h. Il reste donc de grosses marges de progrès possible pour
nos turbines à gaz de modélisme…
Architecture du système

Photo 54 : accessoires minimum
nécessaires au fonctionnement d’une turbine à gaz
Les turbines à gaz ne se suffisent pas à elles mêmes, pas pour
fonctionner et encore moins pour démarrer. La photo 54 montre les principaux
accessoires d’une turbine à gaz dans le cas de la configuration la plus simple.
Pour fonctionner il faut d’abord à une turbine à gaz un régulateur
électronique (à droite sur la photo 54) nommé ECU (Electronic Control Unit)
dans le monde du modélisme et FADEC (Full Autority Digital Electronic Controller)
dans le monde de l’aviation grandeur, car le fonctionnement d’une turbine est
instable sans régulation. L’ECU analyse les mesures de température et de régime
de rotation et commande la pompe à kérosène (en bas à gauche de la photo 54) en
fonction des ces paramètres et de la demande de puissance. Grâce à l’ECU le
système est stabilisé, mais le ralentissement et l’accélération de la turbine
s’en trouvent fortement bridés. Il faut typiquement 2,5 secondes à une turbine
à gaz pour passer du ralenti au plein gaz. Au début de l’ère du réacteur les
régulateurs étaient mécaniques, très compliqués, et leur temps d’accélération
nettement plus importants, ce qui a permis aux alliers de se débarrasser
facilement d’un grand nombre de pilotes allemands d’avions à réactions, malgré
leurs avions plus lents… De plus, comme les réacteurs avaient tendance à
s’éteindre tous seuls, certains as nazis nous ont même quittés sans aucune
intervention de pilote allié. Nos microréacteurs souffrent toujours du problème
d’extinction, favorisé par l’apparition de bulles d’air dans les tubulures de
kérosène, ce qui impose d’utiliser soit des réservoirs souples purgés de leur
air (poches à perfusion), soit des réservoirs tampons pour piéger les bulles.
Le démarrage d’une turbine est compliqué et nécessite un certain nombre
d’étapes successives gérées automatiquement par l’ECU. Plusieurs techniques de
démarrage existent. Il faut dans un premier temps « ventiler » la
turbine à quelques dizaines de milliers de tr/mn, soit à l’aide d’air comprimé
extérieur (bouteille de plongée sous-marine), soit à l’aide d’un moteur
électrique (protubérance visible à l’avant de la turbine de la photo 54). La
seconde solution est celle préférée aujourd’hui.
Après accélération suffisante de la turbine on injecte du propane ou un
mélange de propane/butane (petites bouteilles pour la brasure) souvent embarqué
qu’on allume avec une bougie à incandescence (glow plug). Lorsque la turbine a
suffisamment accéléré le kérosène liquide prend le relais. Ceci impose deux
électrovannes pour opérer le basculement (en haut à droite sur la photo
54) ; le démarrage par inflammation directe du kérosène liquide étant
impossible. Comme le démarrage au propane est contraignant on le remplace
aujourd’hui souvent par le démarrage direct au kérosène gazeux, évaporé sur une
résistance chauffante électrique en céramique avant injection dans le moteur.
Malgré la simplification avec cette seconde solution, deux circuits avec deux
électrovannes restent nécessaires pour passer du kérosène gazeux à faible débit
au kérosène liquide à fort débit.
Matériel disponible
Les deux principaux fabricants de turbines à gaz sont le hollandais AMT [16] qui détient le record de vitesse de 2010 avec une
turbine Olympus à 555,59 km/h et l’allemand JetCat [15],
mais il y a de nombreux challengers cités ici par ordre alphabétique de façon
non exhaustive : ATJ, Behotec, EvoJet, G-Booster, Hawk, I-Jets,
JetCentral, Lambert Microantriebe, Merlin, SimJet, Wren…
La gamme de poussée va de 15 Newton (1,5 kg) à 245000 tr/mn pour la
turbine T32 Kolibri de Lambert Microantriebe à 392 Newton (40 kg) à 98000 tr/mn
pour la turbine Titan de chez AMT. Cette plage de poussées permet en principe
de motoriser des aéromodèles de 2 kg jusqu’à plus de 300 kg dans une
configuration quadrimoteur. Quoi qu’il en soit, le plus gros aéromodèle
officiellement inventorié est l’A380 de Peter Michel propulsé par quatre
turbines de 12 kg de poussée et qui pèse 75 kg.
Comme pour les autres disciplines de l’aéromodélisme, les constructeurs
proposent des aéromodèles spécialement adaptés. Le spécialiste français des
aéoromodèles à réaction s’appelle Christen Diffusion [17]
et propose un choix de modèles de taille raisonnable, c'est-à-dire de moins de
10 kg (photo 55).

Photo 55 : Fouga Magister de
Christen Diffusion [17]
Adaptation au modèle et précautions
En raison de la très forte accélération de la masse d’air, le rendement
de la propulsion est intrinsèquement très faible en vertu de la loi de Froude.
Par exemple, un modèle en vol ascendant à 200 km/h à plein régime voit un
rendement de transmission égal à environ : 200/(200 + 1650) = 0,11, à
comparer au rendement typique de 0,7 pour une hélice. Ce constat conduit à ne
pas raisonner en terme de puissance pour une turbine à gaz, l’essentiel étant
perdu, mais directement en terme de poussée nette résultante exprimée
typiquement en Newtons ou kilogrammes.
Le poids du modèle et son type d’utilisation permettent de choisir
facilement et directement la poussée du réacteur à retenir. Pour un modèle
ordinaire, une poussée de 75 % du poids convient bien. Pour un modèle qui ne
doit pas perdre de vitesse en montée, une poussée égale au poids conviendra.
Pour un modèle « tonique », une poussée égale à 125 % du poids pourra
être choisie.
Pour pallier au mauvais rendement de propulsion on peut utiliser un
turbopropulseur (photo 56). Dans ce cas, une turbine secondaire placée derrière
la turbine du compresseur récupère l’énergie résiduelle des gaz et entraîne une
hélice. Cette disposition est aussi utilisée associée à des réducteurs pour les
propulsions d’hélicoptères (photo 57).


Photo 56 : turbopropulseur
pour aéromodèle (source Jetcat) Photo 57 : propulseur
à microréacteur pour hélicoptère (source JetCat)
L’attrait des bonbonnes pour les utilisateurs de turbines à gaz est
évident si on considère que ces propulsions sont régulièrement associées à une
bonbonne d’air comprimé (bien utile aussi pour remplir les réservoirs d’air
comprimé des trains rentrants et freins pneumatiques) et une bonbonne de
propane. Mais cela ne suffit pas car il faut encore ajouter une bonbonne
d’extincteur à mousse carbonique pour prévenir les incendies potentiels.
L’extincteur est nécessaire pour la sécurité dans les cas de manipulation
de turbines à gaz, mais il vaut mieux aussi rester à une certaine distance
(entre 5 et 10 m) en raison du risque d’ingestion par l’avant de la turbine,
comme en raison de l’éjection de gaz brûlants par l’arrière. De toute façon, la
distance est aussi une nécessité pour épargner les oreilles.
Le moteur électrique se comporte de façon radicalement différente du moteur thermique. La commande du contrôleur définit à quelques pourcents près le régime de rotation, le couple fourni étant alors celui demandé par la charge, donc l’hélice. Par conséquent, le moteur électrique fournit ce que demande l’hélice, même s’il doit griller au bout de quelques secondes pour ça…Ce qui limite un moteur électrique c’est avant tout la température de ses parties vives qui doivent rester en dessous d’un seuil critique, typiquement 120 °C (pour un conducteur émaillé de classe B).
Une puissance de moteur thermique est donc fondamentalement différente d’une puissance de moteur électrique. La puissance d’un moteur thermique est la puissance qu’il est susceptible de fournir au mieux dans des conditions bien précises (au régime de puissance maximale). La puissance d’un moteur électrique est la puissance qu’on peut lui demander indéfiniment sans qu’il surchauffe. Pour ces raisons, 400 W électriques équivalent parfois à plus de 800 W thermiques…ou à moins de 200 W si le moteur est mal refroidi, car l’échauffement dépend beaucoup de la qualité de la ventilation.
L’EDF, par exemple, a fabriqué une génération d’alternateurs de 600 MW qui ne se distinguait de la précédente de 250 MW que par le système de refroidissement. Il faut s’attendre à des écarts encore plus grands dans le domaine du modélisme. La différence entre les modélistes et EDF, c’est qu’EDF calcule ses systèmes de refroidissement alors que certains modélistes, eux, les ignorent totalement…Certains fabricants proposent des modèles de moteurs avec un petit ventilateur centrifuge incorporé, ils sont toujours à préférer car ils garantissent un bon refroidissement.
De plus, l’inertie à l’échauffement permet de « pousser » les moteurs électriques quelques instants sans conséquence. Ainsi, les TGV par exemple, accélèrent jusqu’à leur vitesse de croisière à un courant 1,5 fois supérieur au courant nominal sans aucun dommage. Nous pouvons faire de même, mais durant 10 à 30 secondes seulement car l’inertie thermique de nos moteurs est beaucoup plus faible que celle des moteurs de trains. C’est toujours largement suffisant pour passer une boucle, un renversement, un chapeau haut de forme ou n’importe quelle autre figure de voltige.
Architecture d’un système de propulsion électrique
Un système de
propulsion électrique se compose typiquement des trois éléments suivants :
·
Un
accumulateur de propulsion qui fournit l’énergie au moteur, mais aussi à
l’ensemble radio via un dispositif appelé BEC pour « Battery Eliminator
Circuit » car cette fonction permet d’éliminer la batterie de la radio.
·
Un
contrôleur qui a deux fonctions : contrôler le régime de rotation du
moteur et produire la tension d’alimentation du système radio.
·
Le
moteur de propulsion qui entraîne l’hélice directement ou plus rarement à
travers un réducteur.
On remarquera
qu’avec cette architecture il n’y a plus de batterie de réception ni
d’interrupteur d’allumage de la radio. Toutefois, quelques contrôleurs de forte
puissance (voir au paragraphe sur les contrôleurs) ne fournissent pas l’énergie
pour la radio. La batterie de réception est alors nécessaire à moins d’utiliser
un régulateur spécialisé pour générer la tension pour la radio à partir de
celle de la batterie de propulsion.
Fondement physique
Le comportement du moteur électrique résulte directement des lois de l’électromagnétisme découvertes au 19ème siècle. L’énoncé des lois s’applique à un conducteur électrique rectiligne de longueur donnée l traversé par un courant constant I et baigné dans un champ magnétique orthogonal homogène d’induction B (voir figure 20). La première loi (équation 14) affirme que ce conducteur électrique génère une force F perpendiculaire aux directions de B et I, proportionnelle à I, B et à la longueur l du conducteur. La seconde loi (équation 15) affirme que le même conducteur déplacé à la vitesse V dans le même champ magnétique perpendiculairement aux directions de B et I voit apparaître à ses bornes une tension E proportionnelle à la longueur l du conducteur et à l’induction B.
Fait remarquable : ces phénomènes sont totalement réversibles, c'est-à-dire que si on applique une tension E on obtient une vitesse V et que si on applique une force F on obtient un courant I. La réversibilité, découverte par hasard par le belge Zénobe Gramme, a déterminé la découverte accidentelle du moteur électrique ; seule la dynamo ayant été inventée délibérément au préalable.

Figure 20 : conducteur électrique placé dans un champ magnétique B
![]() (14)
(14)
![]() (15)
(15)
Structure et fonctionnement du moteur électrique idéal
Pour faire un moteur électrique on construit deux éléments :
· un rotor (partie tournante) qui porte des conducteurs électriques et qui est capable de tourner sur lui-même grâce à un axe central de rotation.
· Un stator (partie fixe), pièce creuse qui contient le rotor, porte les paliers de l’axe du rotor et inclut des aimants pour générer un champ magnétique.
Un rotor typique est présenté à la figure 21. Il est constitué d’un cylindre en fer doux (perméable au champ magnétique) de longueur l dans lequel on a fait des encoches, ici quatre (mais il peut y en avoir un nombre quelconque, trois et douze étant très courants en modélisme). On place des bobines en fil de cuivre autour des parties saillantes appelées pôles. La partie des bobines dans le plan de la figure 21 est inactive, par contre, les parties perpendiculaires au plan de la figure constituent en ensemble de conducteurs rectilignes de longueur unitaire l. Ainsi, dans la figure 21 on a un rotor à P = 4 pôles et des bobines à n = 3 spires, ce qui est équivalent à utiliser 4x3x2 = 24 conducteurs rectilignes de longueur l.

Figure 21 : structure simplifiée du rotor d’un moteur électrique à quatre pôles
Le stator de forme annulaire porte des aimants qui couvrent les pôles et fournissent le champ magnétique d’induction magnétique B indispensable au fonctionnement du moteur.
Si le rotor a un rayon r et une longueur l, on obtient les équations générales 16 et 17 du moteur électrique qui se déduisent directement des équations 14 et 15 de l’électromagnétisme en ajoutant seulement un coefficient k pour tenir compte du fait que périodiquement et à tour de rôle chaque bobine est déconnectée et n’agit donc plus, ainsi que pour prendre en compte les diverses façons de câbler entre elles les bobines.
![]() (16)
(16)
![]() (17)
(17)
Dans ces équations, C représente le couple mécanique fourni en N.m, N le régime de rotation en tours par seconde, I le courant en Ampères, E la tension en Volts, B l’induction magnétique en Tesla, l et r respectivement la longueur et le rayon du rotor en mètres.
Ces équations peuvent paraître abstraites et sans grand intérêt au premier abord, mais si on sait les faire parler, elles nous livrent beaucoup d’informations sur les moteurs électriques.
Mais d’abord, multiplions chaque membre des équations 16 et 17 entre eux pour obtenir l’équation 18.
![]() (18)
(18)
Pm est la puissance mécanique et Pe la puissance électrique du moteur. L’équation 18 nous indique donc que le rendement d’un moteur électrique est de 1, soit 100 % puisque Pm = Pe. C’est le cas pour un moteur idéal. On s’en approche avec les moteurs réels, et certaines grosses machines industrielles ont un rendement meilleur que 99,9 %. On est loin des 25 % de rendement des moteurs thermiques dans les bons jours ! Il faudra tout de même pour être exact tenir compte de deux pertes du moteur réel qui sont analysées au paragraphe suivant.
En attendant, les équations 16 et 17 sont suffisantes pour expliquer les principales caractéristiques des moteurs électriques. Mais avant ça quelques remarques s’imposent :
· les équations des moteurs sont indépendantes du type de moteur, ce qui signifie que ce sont les mêmes pour un moteur à balais, « brushless » ou autre.
· On peut faire tourner les aimants au lieu des bobines (moteur « brushless outrunner »). Le rotor est alors le support des aimants.
· On peut mettre les bobinages à l’extérieur et les aimants à l’intérieur (moteur « brushless inrunner »). Le rotor est aussi dans ce cas le support des aimants.
· Lorsque le rotor a tourné d’un pas polaire, les conducteurs voient le champ magnétique inversé. Le couple changerait alors de sens si on n’inversait pas aussi à cet instant le sens du courant dans chaque bobine à l’aide d’un commutateur mécanique (moteur à balais) ou électronique (moteur « brushless » c'est-à-dire sans balai).
· Pour régler la vitesse d’un moteur à balais il faut un variateur électronique qui fait varier la tension appliquée au moteur car en vertu de l’équation 17 le régime de rotation du moteur est proportionnel à la tension appliquée. Pour régler la vitesse d’un moteur brushless il faut un contrôleur électronique qui d’une part fait varier la tension, mais d’autre part assure en plus la commutation périodique du sens du courant dans les bobines.
Analysons maintenant les équations 16 et 17 :
• Le produit l.r définit la taille du rotor. Ces nombres sont parfois mais pas toujours, indiqués dans les noms des moteurs. Le produit 2.π.r.l, surface vive du rotor, représente au sens strict la capacité du moteur et donc l’équivalent de la cylindrée d’un moteur à explosion. Par exemple : un MEGA ACn 22/20/2 est un moteur de πx2,2x2,0 = 13,8 cm2 et un AXI 2208/20 est un moteur de πx2,2x0,8 = 5,5 cm2.
• P est le nombre de pôles. Si P est faible on obtient un fort régime et un faible couple, si P est grand on obtient un grand couple et un faible régime. Le nombre de pôles P agit donc ni plus ni moins que comme un réducteur électromagnétique. Les valeurs classiques de P sont données dans le tableau 4 avec en vis-à-vis les régimes de rotation correspondants maximaux en général admis pour les moteurs « brushless ».
• n correspond au nombre de spires par bobine. Par exemple, le moteur MEGA ACn 22/20/2 déjà présenté a 2 spires par bobine, alors que le moteur AXI 2208/20, lui, en a 20. Le nombre n agit comme un transformateur tension/courant. Si n est faible il y aura un fort courant et une faible tension, si n est élevé il y aura une tension élevée et un courant faible. Le choix de n se fait donc en fonction de la tension de l’accumulateur qui alimente le moteur. Si l’accumulateur n’est pas encore choisie on peut utiliser les critères suivants : en dessous 7,2 V on ne peut pas piloter correctement les transistors de commande du contrôleur, au dessus de 15 Volts on a des difficultés à trouver des contrôleurs avec circuit BEC, et au dessus de 40 Volts on grille les transistors de commutation à moins qu’ils soient du type « haute tension ». En compétition on choisira toujours une tension aussi proche que possible de 40 Volts pour diminuer le courant et par voie de conséquence les pertes par effet Joule (échauffement) dans les fils et les transistors du contrôleur.
• L’induction magnétique B correspond au comburant des moteurs thermiques, c'est-à-dire l’oxygène. Plus il y en a, plus le moteur est puissant. Ce qui différencie nos moteurs à courant continu à balais de nos moteurs « brushless »(c'est-à-dire à courant continu sans balais) n’est pas tant leur système de commutation, qui est l’arbre qui cache la forêt, mais plutôt le fait que les premiers utilisent en général des aimants ferrites qui donnent entre 0,25 et 0,30 Tesla, et les seconds des aimants « Néodyme-Fer-Bore » (le véritable prodige récent dans le domaine de la motorisation électrique) qui donnent, eux, entre 1 et 1,2 Tesla. C’est comme remplacer l’air à 21 % d’oxygène par de l’oxygène pur dans un moteur à explosion !
|
Nombre de pôles |
Régime maximal en tr/mn |
|
2 |
50 000 |
|
4 |
30 000 |
|
6 |
20 000 |
|
9 stator/12 rotor |
17 000 |
|
12 stator/10 rotor |
15 000 |
|
12 stator/14 rotor |
12 000 |
Tableau 4 : régime maximal de rotation typique des moteurs
à courant continu sans balai dits « brushless »
Les imperfections du moteur électrique réel
Le moteur électrique réel se distingue du moteur idéal par des pertes qui se traduisent par la transformation d’une partie du courant électrique en chaleur plutôt qu’en énergie mécanique. Ceci a deux conséquences : diminution du rendement et génération de chaleur qui échauffe le moteur et finalement limite sa puissance par ailleurs essentiellement déterminée par les paramètres l.r, et B des équations 16 et 17. Il n’y a donc pas de formule magique pour augmenter la puissance massique des moteurs comme une forme spéciale de bobinage ou un arrangement mécanique inédit. Les possibilités réelles sont : améliorer le refroidissement, pousser au maximum possible le régime de rotation et augmenter B. Il serait aussi possible d’utiliser du fil conducteur en argent moins résistif que le cuivre. Cette solution est utilisée dans certains moteurs de compétition,
On distingue habituellement deux types de pertes :
Les pertes à vide appelées aussi pertes fer qui correspondent à un courant induit dans le circuit magnétique en fer/silicium et qui se dissipe sous forme de chaleur. Comme le nom le suggère, elles existent même à vide, c'est-à-dire sans que le moteur ne fournisse de puissance. Elles sont à peu près constantes pour une tension d’alimentation donnée et ne dépendent que très peu de la puissance demandée au moteur.
Elles sont faciles à mesurer. Il suffit d’alimenter un moteur plein gaz sans hélice sous la tension nominale U et mesurer le courant à vide Io ; la perte sera le produit U.Io en Watts. Ces pertes représentent typiquement 5 à 10 % de la puissance au meilleur rendement du moteur. Elles augmentent évidement avec la taille du moteur, c’est pourquoi surdimensionner un moteur est une mauvaise idée, car en plus du poids supplémentaire il faudra subir des pertes à vide plus élevées.
Les pertes Joule appelées aussi pertes cuivre qui sont les pertes produites par le courant I dans les fils du bobinage en cuivre à cause de la résistance R de ces fils qui induit une chute de tension ΔU = R.I. Cette chute de tension a deux conséquences : une perte P par transformation de l’énergie électrique en chaleur (effet Joule) P = R.I2 (d’où échauffement supplémentaire) et un ralentissement du moteur car il ne voit plus la tension U, mais seulement la force électromotrice E = U – RI plus faible.

Figure 22 : caractéristiques de régime et rendement d’un
moteur électrique TORCMAN TM350-20/10
La figure 22 donne les courbes de rendement et régime du moteur TORCMAN TM350-20/10 alimenté avec une batterie LiPo 4S de 4 Ah en début de décharge. Ces courbes ont été générées automatiquement à partir de la feuille de calcul électronique Moteurs1 [5]. A partir de cette feuille de calcul on peut générer les courbes de n’importe quel moteur à condition d’y entrer les caractéristiques mesurées ou fournies par le constructeur du moteur.
On observe que le moteur a un très mauvais rendement à faible courant à cause des pertes à vide. On remarque aussi que le ralentissement en fonction de la charge est relativement important, puisqu’on passe de 16000 tr/mn à vide à 11500 tr/mn à charge maximale. Si cette variation est si importante, c’est que les chutes de tension dans la batterie et les éléments auxiliaires ont été prises en compte. Or, si la résistance interne du moteur est de 27 mΩ (à ne pas confondre avec la résistance d’une bobine seule), celle de la somme des éléments auxiliaires (accumulateur, connecteurs, contrôleur, câbles) est dans le cas présent de 36 mΩ, venant pour l’essentiel de la batterie. Le ralentissement vient donc plus de la batterie que du moteur lui-même. Comme le ralentissement vient de la chute de tension qui entraîne des pertes Joule, cela signifie que si la chute de tension est importante, les pertes Joule le sont aussi ; aussi bien dans l’accumulateur que dans le moteur. La feuille de calcul nous permet de trouver qu’à 55 A les pertes Joules dans l’accumulateur se montent à environ 90 W. Or si le moteur peut fonctionner à 100 °C, l’accumulateur doit rester en dessous de 60 °C. Cela prouve qu’il faut absolument bien ventiler l’accumulateur si on ne veut pas courir au désastre en utilisation intensive !
Il faut noter aussi, qu’au fur et à mesure de sa décharge, la tension de l’accumulateur diminue, ce qui ralentit d’autant plus le moteur.
Les divers types de moteur électrique
Le moteur à courant continu à balais a été découvert par l’inventeur belge Zénobe Gramme au tout début du 20ème siècle, quasiment en même temps qu’on inventait l’avion…Gramme a inventé pour les dynamos, puis appliqué aux moteurs, le collecteur qui permet d’inverser au bon moment le courant dans les bobines. En effet, la difficulté du moteur à courant continu tient à ce que lorsqu’une bobine passe d’un pôle sud à un pôle nord d’aimant, le courant se met à produire un couple à contresens ; il faut alors le mécanisme de Gramme pour inverser le branchement de la bobine au bon moment. La photo 58 montre un moteur Mabushi démonté pour mette en évidence le collecteur (partie droite du rotor) et les balais aussi appelés charbons (en bas à droite de la photo au centre du flasque) pour appliquer le courant au collecteur tournant. M. Mabushi, inventeur d’une machine à bobiner automatiquement les rotors et passionné de modélisme, mérite ici qu’on lui rende hommage car sa société a été la principale source de moteurs économiques pour le modélisme pendant des décennies, grâce principalement à une série de moteurs spécialement adaptés à notre loisir, produits - dit on - à perte.
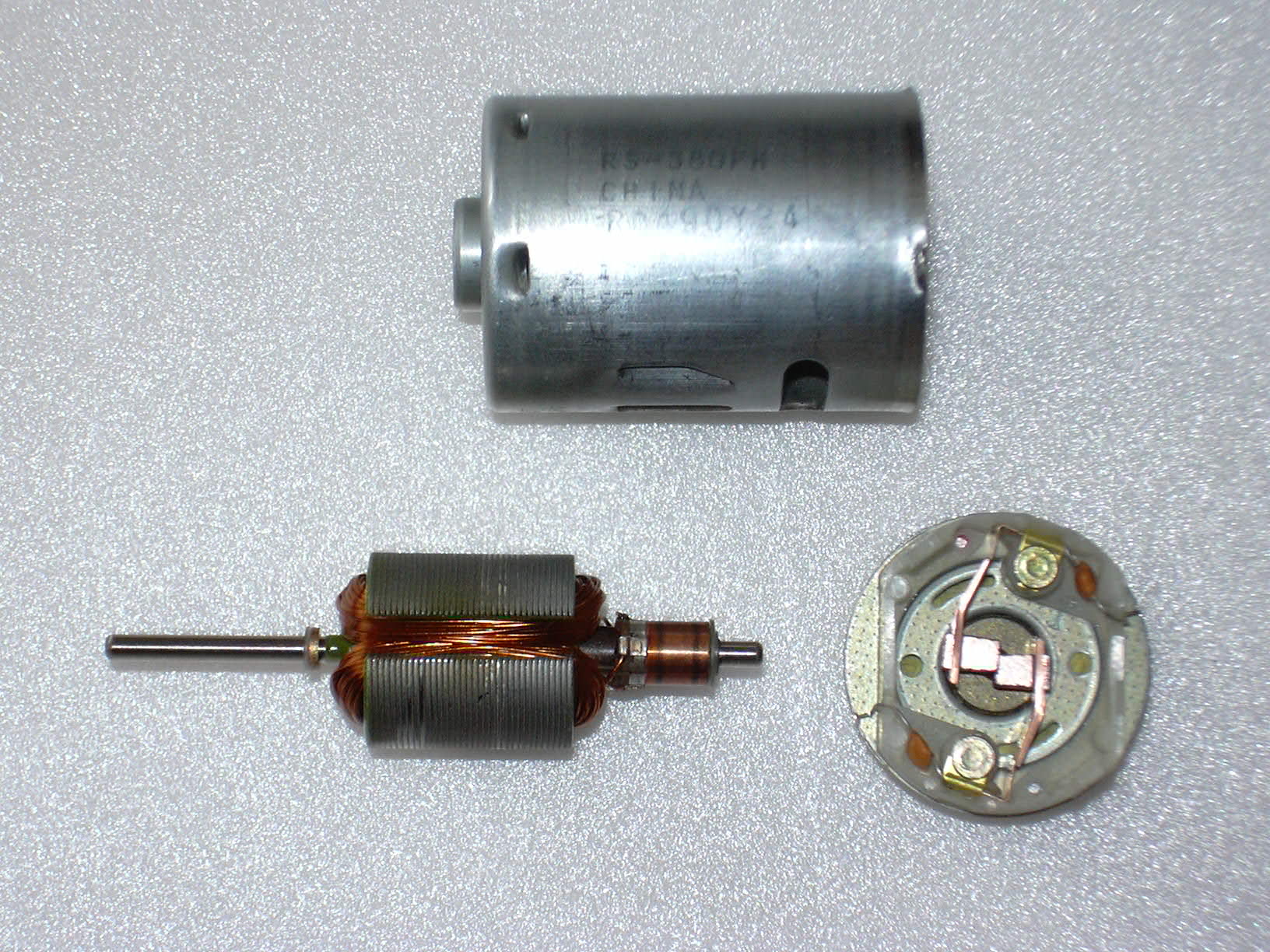
Photo 58 : moteur à courant continu Mabushi démonté
Le moteur à courant continu sans balai dit « brushless » beaucoup plus performant que le précédant utilise un système de commutation électronique placé dans le contrôleur au lieu de mécanique. Mais, comme il a été écrit plus haut, ce n’est pas de là que viennent ses qualités ; la commutation électronique étant surtout un plus pour la longévité. Les performances du « brushless » viennent des aimants « Néodyme-Fer-Bore » beaucoup plus puissants que les aimants ferrite des moteurs Mabushi. Ils ont aussi moins de perte à vide grâce à l’utilisation de paliers sur roulement à billes plutôt que des paliers lisses en bronze comme les moteurs Mabushi.
Les moteurs « brushless » se déclinent principalement dans le microcosme du modélisme en deux variantes selon que le bobinage forcément fixe − car il n’y a plus de collecteur − est à l’extérieur (« inrunner » comme disent les anglo-saxons car c’est l’intérieur qui tourne) ou au centre (« outrunner » comme disent les anglo-saxons car là c’est l’extérieur qui tourne).
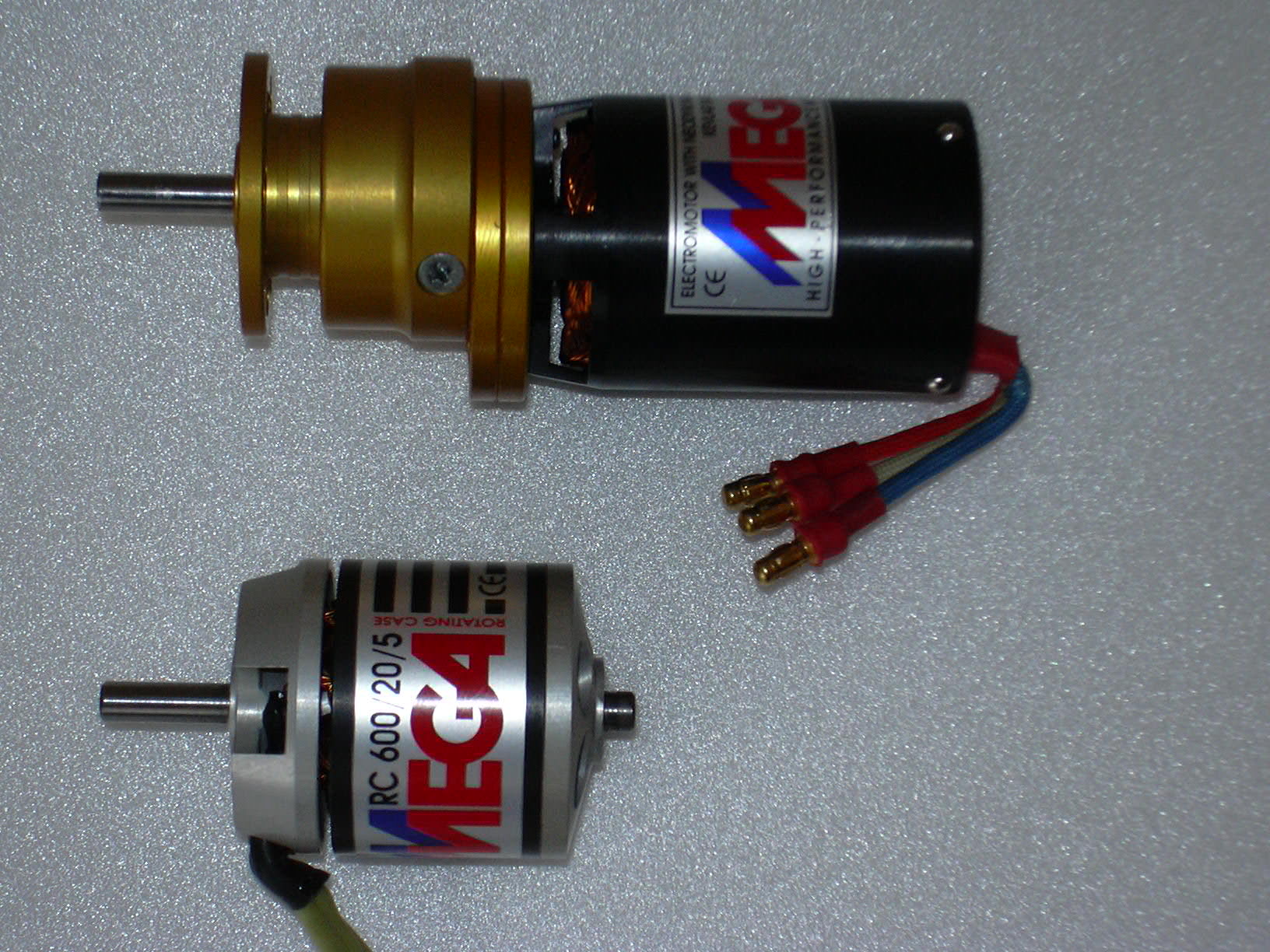
Photo 59 : moteur brushless « inrunner » avec réducteur (en haut) et
moteur brushless « outrunner » sans réducteur (en bas)
Sans balai à rotor interne
Les « inrunners » ont été les seuls moteurs brushless utilisés au début de la propulsion électrique en aéromodélisme. Ils ont le plus souvent deux ou quatre pôles (voir photo 59 en haut) et nécessitent donc un réducteur du fait des régimes importants de rotation (voir tableau 4) incompatibles avec les régimes de rotation maximaux des hélices (voir tableau 1). Leur rendement maximum est de l’ordre de 90 %, mais le réducteur en aval diminue ce rendement d'environ 5%. Ils sont d’une utilisation plutôt rare aujourd’hui dans notre univers car supplantés par les « outrunners ». On les distingue facilement par le fait que leur forme est un cylindre fixe avec seul un axe tournant à une extrémité, comme les moteurs à courant continu à balais. Il y a une exception : le Tango de Kontronic de la photo 65 dont la partie externe tourne. Ils sont surtout utilisés pour les turbines qui doivent tourner très vite du fait de leur faible diamètre car ils peuvent les entraîner directement. Ils sont aussi utilisés dans les racers au fuselage étroit du fait de leur faible diamètre. Si on les utilise avec des hélices classiques on ajoute un réducteur en bout (voir figure 59 en haut) qui divise le régime de rotation par deux à sept. Les fabricants de moteurs brushless inrunners sont plutôt rares. Les principaux fabricants en 2010 sont : Feigao, Hacker (Allemagne), Mega Motor (République Tchèque), Kontronic (Allemagne), XPower.
Sans balai à rotor en cloche
Les « outrunners » (voir photo 59 en bas) sont souvent appelés LRK (des initiales des inventeurs allemands : C. Lucas, L. Retzbach et E. Kühfuß). Ce sont des moteurs à grand nombre de pôles (le plus souvent 12 au stator et 14 au rotor) qui peuvent donc se passer de réducteur. Toute l’astuce a été une configuration particulière des aimants dont le nombre est différent de celui des pôles bobinés, ce qui a permis de considérablement simplifier le bobinage et d’utiliser des tôles de rotor de petits moteurs universels d’appareils électroménagers, mais a obligé à placer les aimants à l’extérieur (comme sur un moteur à balais) avec comme conséquence que c’est la partie extérieure qui tourne (d’où le nom anglais). Ils sont à puissance égale typiquement beaucoup plus courts et de plus fort diamètre que les « inrunners ». On les distingue facilement par le fait que la partie externe tourne ; seule un des deux flasques étant fixe et sert à la fixation, parfois par l’arrière, parfois par l’avant. Il y a comme pour les innrunners une exception : les moteurs MVVS de République Tchèque qui possèdent un capot de protection et qui ressemblent donc à un moteur inrunner (voir photo 60). Il y a en 2010 de très nombreux fabricants de moteurs brushless outrunners. Voici un échantillon non exhaustif de marques dont certaines sont des sous-marques : AXI (République Tchèque), Dualsky, Electronic Model (France), Flyware (Allemagne), Jamara, Graupner, Hacker (Allemagne), Kontronic (Allemagne), Model Motors (République Tchèque), Mega Motors (République Tchèque), Multiplex (Allemagne), MP JET, MVVS (République Tchèque), ProTronic, Roxxy, Scorpion, Torcman (Allemagne), XPower.
N. B. : le moteur outrnunner LRK de la photo 59 est globalement plus petit que le moteur inrunner quadripolaire montré au-dessus, mais aussi nettement moins puissant.

Photo 60 : brushless outrunner MVVS avec capot externe de protection
pour éliminer toute partie externe tournant hormis l’arbre de transmission
La puissance massique (puissance par unité de masse) des LRK est comparable à celle des moteurs dits « inrunners » puisqu’ils sont régis exactement par les mêmes lois (équations 16 et 17). Ils souffrent toutefois de pertes fer plus élevées du fait de leur configuration particulière. Leur rendement plafonne donc en général à 80 %, mais cette valeur modeste est compensée par l’absence de réducteur, et donc des pertes mécaniques et de la masse associées. De la lutte entre technologies, le LRK est finalement sorti vainqueur vers 2007 après plusieurs années de lutte, grâce à sa simplicité et son coût réduit du fait de l’absence de réducteur.
Mais les moteurs LRK ont un autre avantage, c’est qu’on peut facilement les fabriquer soi-même à partir d’éléments indépendants achetés dans le commerce (voir BATT-MANN [18] en Allemagne). Plusieurs sites web leur sont consacrés, en particulier celui de la société TORCMAN [19] particulièrement bien fait.

Photo 61 : bobinage d’un stator LRK 12 pôles juste achevé Photo 62 : rotor LRK à 14 aimants après collage final
Les photos 61 et 62 montrent un stator et un rotor de moteur LRK en cours de montage. Les photos 63 et 64 montrent le moteur en cours d’assemblage puis assemblé. On remarquera que la partie gauche du moteur sur la photo 63 montre le rotor externe souvent appelé cloche qui tourne avec l’axe du moteur. C’est un moteur TORCMAN de ce modèle qui a été monté sur le mini-drone du concours de la DGA de l’équipe ENSAM/Université de Clermont, car bobiner le moteur soi même a permis de parfaitement adapter le moteur au drone et donc de gagner du poids. L’avantage supplémentaire est que le moteur étant démontable, il est possible de changer le bobinage en cas de besoin, ou de le refaire s’il est accidentellement grillé.

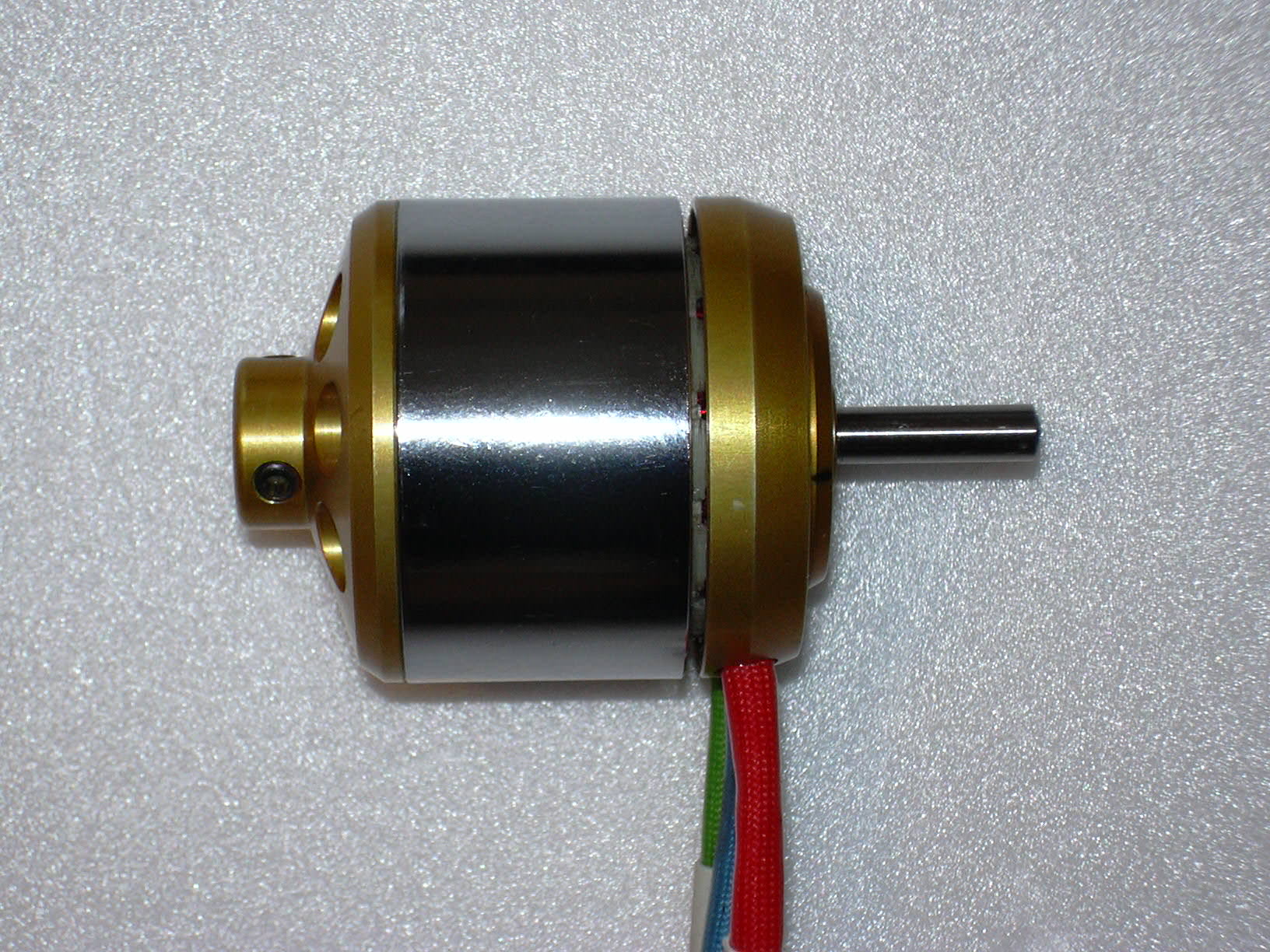
Photo 63 : moteur LRK en cours d’assemblage (rotor à gauche) Photo 64 : moteur LRK assemblé avec partie tournante externe
Le plaisir de faire ou monter soi-même son moteur est de même nature que celui de concevoir ou faire soi même sa radiocommande ou son modèle réduit d’avion ou planeur ; ça ne se discute pas. Sur le site web de la société TORCMAN on trouvera tous les détails pour déterminer avec précision son moteur (qui n’auront plus aucun secret pour vous après la lecture des documents du site) et toutes les astuces pour réussir la fabrication. Mais attention, l'usinage des pièces demande du travail et le bobinage qui parait simple est plus délicat qu’il n’y parait ; il faut plusieurs heures et un tour de main qu’on n’acquiert qu’après le deuxième ou troisième bobinage.
N. B. : pour ceux qui ne sont pas polyglottes, la page d’accueil de la version française du moteur de recherche Google dispose d’un lien hypertexte « Outils linguistiques » (à droite de la zone d’entrée de la chaîne de recherche) qui conduit à une page consacré à la traduction de tout document d’une langue vers une autre.
Les moteurs sans noyau tournant
Le support de
bobinage aussi appelé noyau tourne par rapport au champ magnétique, ce qui
induit les pertes fer et augmente considérablement l’inertie à l’accélération
si cet élément fait partie du rotor. Pour ces raisons, certains moteurs
(notamment d’automatisme) utilisent un noyau désolidarisé du bobinage qui n’a
alors plus de support mécanique. Le fabricant allemand KONTRONIC [20]
utilise cette disposition nommée « ferrous loss free » sur certain de
ces moteurs « inrunners » (voir photo 65).
N. B. :
un lecteur « fin observateur » notera que le noyau est dans le cas de
la photo 64 en réalité une coquille (partie droite de la photo) et que de plus
elle tourne ! C’est vrai, mais comme le moteur est « inversé »,
le noyau est lui-même inversé et il reste fixe par rapport au champ magnétique
tournant du rotor (les six aimants de la partie gauche de la photo). On notera
aussi que la cloche (alias coquille et noyau) donne l’aspect d’un moteur
« outrunner » alors que de plus il s’agit d’un moteur
« inrunner » amélioré par le fait que la cloche joue en plus le rôle
de ventilateur centrifuge pour doper la puissance et diminuer les pertes. En
observant les caractéristiques on s’aperçoit que ce moteur à une puissance
massique exceptionnelle ; en effet, il peut tourner à 30000 tr/mn au lieu
de 20000 grâce à la suppression des pertes fer.

Photo 65 : moteur brushless inrunner Tango de Kontronic
sans noyau tournant
(et pourtant il tourne…)
Les servomoteurs
utilisent des moteurs électriques à courant continu à balais. Le premiers
servomoteurs utilisaient tous des moteurs sans noyau tournant nommés
« coreless » ou à « rotor en cloche » afin de diminuer
l’inertie de la partie tournant et donc d’améliorer l’accélération. Au XXIème
siècle quelques servomoteurs de haut de gamme utilisent encore ce type de
moteur (voir chapitre radiocommande).
Les accumulateurs sont utilisés depuis le début du modélisme RC pour faire fonctionner les radiocommandes, mais depuis quelques années on utilise aussi largement les accumulateurs pour la propulsion, ce qui a conduit à se tourner vers des types d’accumulateurs beaucoup plus performants, mais aussi plus compliqués à mettre en œuvre que les antiques accumulateurs au plomb (Pb) et Cadmium/Nickel (NiCd). Les tenants et aboutissants concernant ces accumulateurs vont donc être présentés ici, à savoir pour chaque type d’accumulateur :
· les caractéristiques principales,
· la charge et décharge,
· le stockage et l’entretien,
· les problèmes de sécurité liés.
Caractéristiques générales des accumulateurs
Les modélistes connaissent presque tous aujourd’hui les quatre types d’accumulateurs universellement utilisés dans l’univers modéliste :
· Les accumulateurs au plomb (Pb) utilisés pour activer les « glow plugs », mais servant aussi couramment de source d’énergie pour les démarreurs au sol et pour recharger les autres accumulateurs.
· Les accumulateurs cadmium/nickel (NiCd), longtemps utilisés comme accumulateurs d’émission et de réception avant d’être utilisés pour la propulsion. Ce type d’accumulateur a été supplanté par les accumulateurs NiMh aux caractéristiques très proches mais plus performants et moins polluants (car le cadmium est toxique).
· Les accumulateurs nickel/métal hydride (NiMh). Ces accumulateurs ont des caractéristiques très semblables aux NiCd, y compris les boîtiers ; ce qui permet de les substituer au NiCd sans autre forme de procès.
· Les accumulateurs à base de lithium dans leurs diverses variantes qui sont les plus performants, développés récemment pour l’électronique portative et qui tendent petit à petit à se substituer aux autres types d’accumulateurs dans l’univers modéliste.
Le principe de fonctionnement général de ces accumulateurs est parfaitement développé sur le site de la Wikipédia [21] auquel il suffit de se reporter si on souhaite approfondir les principes mis en jeux.
Caractéristiques électriques générales
Le mieux pour
comprendre les divers paramètres électriques des accumulateurs est de faire une
analogie avec un système hydraulique, même si l’électricité à des propriétés
plus subtiles qu’un flux hydraulique. La figure 23 montre un circuit électrique
de lampe de poche comparé à celui d’une turbine électrique alimentée par un
réservoir d’eau autonome.

Figure
23 : analogie
électricité/hydraulique
Le circuit
hydraulique est composé d’un réservoir de capacité C exprimée par exemple en
litres. Il alimente une turbine qui transforme l’énergie hydraulique en énergie
mécanique. La puissance P récupérée par la turbine est proportionnelle au
produit du débit d’eau D exprimé par exemple en litres/seconde par la hauteur
d’eau H représentant la pression exprimée en mètres d’eau ou en bars. On peut
donc remarquer que la quantité d’énergie récupérable (produit de la puissance
par le temps) est proportionnelle, non seulement à la capacité C du réservoir,
mais aussi à la hauteur d’eau H. C’est au demeurant pour cette raison qu’on a
deux types de barrages, des barrages de montagne qui récupèrent des petites
quantités d’eau de torrents, mais avec de très grandes hauteurs de chute (elles
peuvent dépasser 1000 m) et des barrages de rivière qui récupèrent de très gros
débits mais avec des hauteurs de chute de quelques mètres seulement.
Le circuit
électrique est analogue, l’accumulateur, constitué ici d’une batterie de deux
éléments d’accumulateur en cascade (on dit en série) fournit une tension U
exprimée en Volts équivalente à la pression d’eau H. On remarquera simplement
que le fait de mettre deux éléments en série double la tension ; c’est la
façon d’ajuster la tension équivalente à la pression de l’eau. La puissance P
dissipée par l’ampoule (et donc récupérée sous forme de chaleur et lumière) est
le produit du courant I exprimé en Ampères équivalent au débit hydraulique D
par la tension U équivalente à la pression d’eau H. Elle s’exprime en Watts et
est strictement de même nature que la puissance hydraulique qui peut également
s’exprimer en Watts. La grosse barre horizontale du symbole de la batterie
représente la plaque de stockage de l’électricité (pôle plus) dont la capacité
s’exprime en Ampères.Heures (produit du courant par le temps pendant lequel
l’accumulateur peut fournir le dit courant). L’électricité après avoir traversé
l’ampoule est récupérée par l’électrode négative (barre horizontale plus petite
représentant le pôle moins).
Il est important de
bien comprendre ici que pour les anciens le circuit électrique débitait un
courant (fluide) électrique invisible allant du pôle « plus » vers le
pôle « moins ». C’est seulement à la fin du XIXème siècle
qu’on a compris qu’il s’agissait en fait de particules chargées négativement
alors baptisées « électrons » qui circulaient du pôle négatif vers le
pôle positif. Il ne faut donc pas s’étonner que le courant aille en sens
inverse des électrons et que l’électricité soit stockée sur la plaque
positive ! Un courant électrique est quelque chose de purement
conventionnel, l’opposé d’un flux d’électrons.
Concernant la façon
de brancher nos éléments d’accumulateur d’une capacité C et tension
individuelle U/2, on peut remarquer qu’on a ici deux possibilités :
·
Soit les
brancher en série comme sur la figure 23, ce qui double la tension (qui passe
de U/2 à U).
·
Soit les
brancher en parallèle, ce qui double la capacité et pour une puissance donnée
le courant, qui passent respectivement de C à 2C et de I à 2I.
D’un point de vue théorique, brancher des
éléments de batterie en série (xS, x représentant le nombre d’éléments) ou en
parallèle (xP, x représentant le nombre d’éléments) n’a pas d’importante, car
la puissance comme l’énergie restituée ne changent pas. D’un point de vue
pratique les choses sont un peu différentes car lorsqu’on augmente la tension
on diminue le courant, ce qui permet d’utiliser du fil électrique de section
plus faible et donc plus léger. Donc, en modélisme les éléments d’accumulateur
sont mis en série ; en limitant toutefois la tension au maximum que peut
accepter le contrôleur. Dans le domaine du transport du courant, on augmente la
tension jusqu’à parfois un million de Volts dans le seul but de diminuer le
courant…
Il reste une caractéristique qui n’est pas
représentée dans la figure 23. Il s’agit du débit d’eau maximum dans le cas du
système hydraulique lié directement au diamètre de la tuyauterie. L’équivalent
électrique est le courant maximum autorisé des accumulateurs, exprimé en
multiple de leur capacité exprimée en A.h. Ainsi un accumulateur de 1 A.h et
20C pourra débiter au maximum 1 x 20 = 20 A. Autrement dit on pourra le décharger
en 60 mn/20 = 3 mn, mais pas plus vite. Cette valeur a de l’importance surtout
en compétition et en acrobatie. Dans le cas du choix d’une autonomie de 10 mn
ou plus, des accumulateurs ayant une capacité de décharge de 20 C (en tenant
compte des pointes de courant) font l’affaire.
Le tableau 5 ci-après résume les
caractéristiques de nos accumulateurs. Les valeurs données étant des moyennes,
car chaque modèle, marque comme élément a ses caractéristiques propres. On
remarquera que le tableau ne donne pas la capacité en Ah/kg, mais en Watts/kg
afin que les nombres soient comparables. Il indique aussi la puissance
massique, qui est surtout intéressante en compétition (F5B et F5D) où l’on
cherche à extirper un maximum de puissance des accumulateurs en très peu de
temps. Le tableau donne aussi la durée de vie en cycles de charge/décharge qui
dépend beaucoup des conditions d’utilisation ; les valeurs indiquées ne
sont donc que des ordres de grandeur. Enfin, le prix indiqué varie fortement
d’un modèle d’accumulateur à un autre, comme d’un magasin à un autre ; il
n’est donc qu’indicatif…
|
Type d’ accumulateur |
Tension nominale (V) |
Capacité par kg en W.h |
Débit maximum |
Puissance maxi. par kg |
Durée de vie en cycles |
Prix en € Par W.h |
|
Pb étanche |
2,05 |
23 |
25
C |
575 |
250 |
0,25 |
|
NiCd |
1,25 |
35 |
20
C |
700 |
800 |
1,5 |
|
NiMh |
1,25 |
80 |
15
C |
1200 |
400 |
1,6 |
|
LiIo |
3,6 |
120 |
10
C |
1200 |
100 |
2,2 |
|
LiPo |
3,7 |
125 |
25
C |
3150 |
100 |
2,4 |
|
LiFe |
3,3 |
100 |
35
C |
3500 |
1000 |
3,1 |
Tableau 5 : caractéristiques générales des divers types
d’accumulateurs
La résistance interne
La grandeur
secondaire des accumulateurs appelée la résistance interne est importante. En
observant le schéma hydraulique on comprend bien que le tuyau qui amène l’eau à
la turbine va générer une perte de charge qui limitera la pression à la
turbine. Cette perte de charge sera d’autant plus importante que la section du
tuyau sera faible, que sa longueur sera importante et que le débit sera fort.
Il en va strictement de même pour les accumulateurs. Leurs plaques, leurs
connexions et leur électrolyte limitent le débit. Cette limitation s’appelle la
résistance interne (certains utilisent le terme d’impédance). Elle s’exprime en
Ohm (symbole Ω). Les accumulateurs présentent en fait deux sources de
chute de tension, une directement liée à l’évolution chimique des électrodes
qui diminue la tension au cours de la décharge et l’autre liée à la résistance
interne qui provoque une chute de tension proportionnelle au courant selon la
loi d’Ohm définie par l’équation 19.
∆U = R.I (19)
Dans l’équation 19, ∆U
représente la chute de tension en Volts, R la résistance en Ohms et I le courant
de charge ou de décharge en Ampères. Ainsi, un accumulateur de 12 V (10
éléments SubC de type NiMh 4,6 Ah en série) et de résistance interne de 30 mΩ
présentera une chute de tension de 0,03 x 80 = 2,4 V sous 80 A ; ce qui
est loin d’être négligeable. Malheureusement, la chute de tension n’est qu’un
moindre mal car il y a en plus un effet secondaire induit qu’on appelle l’effet
Joule. C’est la transformation de l’énergie perdue en chaleur. L’effet Joule
est traduit par l’équation 20 :
P = R.I2 (20)
Selon cette
équation, la puissance P dissipée en Watts est proportionnelle à la résistance
R multipliée par le carré du courant. Ainsi, dans notre exemple précédant,
l’accumulateur va dissiper une puissance P = 0,03 x 80 x 80 = 192 W. Cette
puissance dissipée, très importante, va induire un nouvel effet
secondaire : l’échauffement de l’accumulateur. L’échauffement de
l’accumulateur ne peut malheureusement pas être quantifié par une simple règle
de trois ; mais en tout état de cause on aura intérêt à fortement ventiler
l’accumulateur si on veut éviter un nouvel effet en cascade. En effet, si
l’accumulateur chauffe trop (typiquement au-delà de 80°C), l’électrolyte va
s’évaporer et la pression interne de l’accumulateur va augmenter.
Éventuellement des réactions chimiques parasites pourront apparaître. Selon le
type d’accumulateur les conséquences seront variables :
·
Fuite
d’électrolyte en cas de présence d’un évent de sécurité,
·
Explosion
dans le cas de la majorité des accumulateurs en boîtier cylindrique,
·
Gonflement
(suivi éventuellement d’une explosion) dans le cas des accumulateurs LiPo en
boîtier plat souple.
D’une façon
générale, trop faire débiter un accumulateur (en charge ou en décharge) sans le
ventiler suffisamment peut avoir des conséquences peu réjouissantes, d’autant
plus que le dernier évènement induit en cascade est parfois un incendie…
Par conséquent : Il est essentiel de ne pas dépasser le courant maximum des accumulateurs
et de les ventiler énergiquement comme les moteurs.
Charge et décharge
En plus des caractéristiques générales qui viennent d’être évoquées, les accumulateurs ne peuvent pas être chargés et déchargés n’importe comment. Il faut respecter certaines spécificités :
· vitesse de charge et décharge,
· tension minimale et maximale,
· température,
· …
Étant donné que chaque point est spécifique de chaque type d’accumulateur, il est développé séparément pour chaque type d’accumulateur. Toutefois, seul l’essentiel est précisé. On pourra obtenir beaucoup plus de détails sur le site web anglophone et germanophone suivant : « Battery University » [22].
Stockage et entretien
Comme pour la charge et la décharge, chaque type d’accumulateur a ses spécificités en termes de stockage et d’entretien. Certains sont sans entretien, d’autres nécessitent le plus grand soin…
Sécurité
Le dernier point important est la sécurité. En effet, certains accumulateurs ne sont pas sans risque, même bien utilisés. Les accumulateurs au plomb ont le triste privilège de laisser fuir parfois de l’acide sulfurique. Les accumulateurs NiCd arrivent à corroder leurs fils de liaison, tandis que les LiIo osent même prendre feu spontanément ou exploser… De spectaculaires photos sont visibles dans le chapitre « Lithium-ion safety concerns » du site « Battery University » qui vient d’être mentionné. Quelques précisions sont données dans le paragraphe correspondant de chaque type d’accumulateur.
D’une façon générale, c’est une bonne idée de ne pas laisser les accumulateurs dans les modèles, mais de les stocker au frais dans une cave ou un garage, dans un endroit où un feu d’accumulateur ne risque pas de transmettre le feu au pavillon ou à l’appartement…
Dimensionner un accumulateur
Le premier souci du
modéliste est de choisir des accumulateurs adaptés à ses besoins. Dans le cas
d’une propulsion par moteur thermique ou pour les planeurs, il suffit coté
émission de choisir les accumulateurs recommandés par le fabricant de la radio.
Coté réception, c’est un peu plus compliqué. Pour un petit modèle, des
accumulateurs de 500 mAh sont suffisants. Un modèle standard (masse de l’ordre
de 2 kg) se satisfait d’une capacité de 1 Ah. Dans le cas d’un gros modèle
(jusqu’à 6 kg) on préfèrera une capacité de l’ordre de 2,5 Ah. Une autre
question plus délicate se pose coté réception. Pendant longtemps on a alimenté
les récepteurs avec 4 éléments NiCd en série, donc sous une tension d’environ
4,8 V à 5 V. Comme le matériel était garanti jusqu’à 6 V (en ingénierie on
prend toujours des marges de sécurité) certains ont cru bon de passer à 5
éléments pour augmenter la puissance des servos. Certains utilisent cette
technique en compétition, mais en prenant des précautions. C’est une très
mauvaise idée d’utiliser 5 éléments sans précaution, car dans ces conditions,
chargé à bloc, l’accumulateur peut dépasser 7 V et nombre de récepteurs et de
servos ne résistent pas à ce traitement. Il est donc de loin préférable
d’utiliser des servos un peu plus gros (à condition que ce soit réellement
utile) avec seulement 4 éléments. Ceci étant, on trouve dans le commerce
modéliste de nombreux régulateurs capables de générer une tension de l’ordre de
5 V (parfois 5,5 V ou 5,7 V) à partir d’une batterie LiPo à 2 éléments ou 6
éléments NIMh.
Dans le cas d’une propulsion
électrique, le problème est plus complexe puisqu’il faut choisir au mieux
l’accumulateur de propulsion qui servira aussi pour la réception sauf si le
contrôleur ne possède la fonction BEC (Battery Eliminator Circuit). Trop gros
il alourdirait et fragiliserait inutilement le modèle, trop petit il serait
trop sollicité et conduirait à des temps de vol trop courts. La tension retenue
doit être aussi proche que possible de la tension maximale prévue pour le
moteur afin de ne pas perdre une partie de son potentiel. Pour le choix de la
capacité, il suffit de multiplier courant moyen consommé par le moteur et le
temps de vol désiré en heures. Le tout étant de connaître le courant
moyen ! Bien sur, la feuille de calcul « centrage.xls » [23] peut faire tous les calculs pour vous.
En ce qui concerne
le débit maximum, il suffit d’estimer le courant de pointe qui pourra être
estimé en première approximation au double du courant moyen et vérifier si la
capacité de débit est suffisante. On peut évidemment aussi utiliser la feuille
de calcul « centrage.xls » [23]. Dans le cas du
SuperMiss, la feuille de calcul nous indique que le modèle consommera environ 6,7
A en moyenne et que si on choisit un accumulateur de 0,8 Ah il devra pouvoir
soutenir un débit de 17 C, ce qui est sans problème dans le cas d’éléments LiPo
de qualité. Le temps de vol maximum sera quant à lui d’environ 7,2 mn.
Les accumulateurs au plomb
Les accumulateurs au
plomb à un élément unique de 2 V peuvent servir à alimenter les « glow
plugs » sous certaines conditions. Les bougies à incandescence sont
prévues typiquement pour être alimentées par des piles salines de 1,5 V et plus
rarement par des batteries 2 V au plomb. Un accumulateur 2 V peut néanmoins
servir pour des bougies prévues pour 1,5 V à condition d’utiliser un câble
suffisamment long entre l’accumulateur et la pince à bougie pour faire chuter
la tension à 1,5 V, ou en ajoutant une résistance adaptée vendue en magasin de
modélisme.
Mais les
accumulateurs au plomb sont la principale source d’énergie sur les terrains
pour recharger les autres accumulateurs. L’accumulateur typique est une
batterie de voiture transportée dans le coffre, mais ça peut être la batterie
de la voiture elle-même à condition de ne pas trop tirer dessus, sous peine de
devoir rentrer à pieds chez soi…
Caractéristiques principales
Ces accumulateurs
sont constitués principalement plaques de plomb et d’oxyde de plomb pour les
électrodes et d’acide sulfurique sous forme liquide ou gélifié entre les
électrodes. Elles sont maintenant le plus souvent étanches et dites « sans
entretien » car il n’y a plus à rajouter d’eau régulièrement. Elles sont
constituées typiquement de 6 éléments en série, fournissant entre 12,65 V et
11,9 V en décharge, mais 13,8 V dans la voiture car elles sont dans ce cas en
charge sous tension constante tant que le moteur tourne.
Charge et décharge
Ces accumulateurs doivent être chargés à courant constant (typiquement
0,1 C c'est-à-dire au dixième de leur capacité) jusqu’à une tension de 2,3 V
par élément, puis à tension constante pour éviter la formation d’hydrogène et
oxygène gazeux nuisible (dégazage). La décharge ne doit en aucun cas faire
tomber la tension en-dessous de 2,0 V par élément, sous peine de sulfater
l’accumulateur (formation de cristaux de sulfate), ce qui le dégrade en général
irréversiblement.
Stockage et entretien
Les accumulateurs au plomb doivent être stockés à pleine charge ou en
leur fournissant une charge d’entretien permanente sous tension constante de
2,25 V par élément. Ils ont une autodécharge naturelle qui leur fait perdre
entre 5 % et 10 % de leur charge par mois, ce qui justifie une charge d’appoint
régulière lorsqu’ils ne sont pas utilisés.
Ces accumulateurs supportent un nombre de cycles de charge/décharge de
200 à 300, à condition que la décharge soit limitée car ils n’aiment pas les
décharges complètes. Peu sollicités, c'est-à-dire maintenus le plus souvent à
une tension de 2,3 V par élément (comme dans une voiture), leur durée de vie
normale est de 10 ans, mais peut atteindre dans les meilleurs cas 15 ans.
Précautions
La principale précaution à prendre avec les accumulateurs au plomb est
d’éviter la décharge complète qui les dégrade (voir charge et décharge). On
évitera aussi de les stocker dans des endroits sensibles à l’acide, car ils
sont toujours susceptibles de fuir légèrement.
Les accumulateurs Cadmium/Nickel
Les accumulateurs Cadmium/Nickel ou NiCd, historiquement les plus anciens après les accumulateurs au plomb, sont aussi les moins performants après ceux au plomb. Comme de plus, le cadmium est un polluant, ils sont en voie de disparition. Ils ont quand même quelques qualités : grande robustesse (ils peuvent supporter jusqu’à 1000 cycles de charge/décharge), possibilité de les décharger complètement et de les stocker ainsi.
Caractéristiques principales
L'anode est constituée d'un hydroxyde de nickel, la cathode de cadmium et l'électrolyte alcalin est en général KOH ; d'où le nom de ces accumulateurs. On doit distinguer plusieurs variantes :
·
Les
éléments de base, qui doivent être chargées à 0,1 C ; ils ont disparu.
·
Les
éléments pour forte puissance qu’on peut charger à 3 C et décharger à 30 C sans
problème. Ils ont pratiquement disparu en 2010.
·
Les
éléments à haute densité d’énergie sont les seuls qui subsistent encore,
principalement pour des opérations de maintenance.
Ces accumulateurs
sont traditionnellement présentés dans des cylindres métalliques capables de
supporter la pression due à l’évaporation accidentelle d’une partie de
l’électrolyte. Ils sont parfois aussi munis d’un évent pour laisser échapper
l’excès de pression et ainsi éviter les risques d’explosion.
Les dimensions des
éléments sont devenues des standards repris très souvent pour d’autres types
d’accumulateurs. Elles sont rappelées dans le tableau 6 ci-après :
|
Type |
Diamètre (mm) |
Hauteur (mm) |
Masse (g) |
|
1/3 AAA |
10,5 |
16 |
3,5 |
|
½ AAA |
10,5 |
22 |
6 |
|
2/3 AAA |
10,5 |
30 |
9 |
|
AAA |
10,5 |
44,5 |
15 |
|
1/3 AA |
14,2 |
16 |
7 |
|
2/3 AA |
14,2 |
30 |
14 |
|
AA |
14,2 |
50 |
30 |
|
2/3 A |
17 |
28,5 |
21 |
|
4/5 A |
17 |
43,5 |
27 |
|
A |
17 |
50 |
33 |
|
4/3 A |
17 |
66 |
55 |
|
4/3 FA |
18 |
67 |
62 |
|
2/3 SC |
23 |
26 |
34 |
|
4/5 SC |
23 |
34 |
42 |
|
Sub C ou SC |
23 |
43 |
60 |
|
C |
26 |
50 |
80 |
|
D |
33 |
60 |
160 |
|
3/2 D |
33 |
90 |
230 |
Tableau 6 : dimensions standard des accumulateurs NiCd et
NiMh
La tension des accumulateurs NiCd passe de 1,2 V par élément à 95 % de la charge maximale à 1,05 V à 5 % de cette charge. La tension est donc une mesure assez fiable du degré de charge, d’où les voltmètres à aiguilles, indicateurs de charge des anciens émetteurs radio et les indicateurs à leds qui devraient toujours être utilisés dans les systèmes de réception.
Charge et décharge
Les éléments à forte
densité d’énergie ont des résistances internes assez élevées. Cela les rend
impropres à l’utilisation comme accumulateurs de propulsion. Par contre, ils
sont tout à fait adaptés à l’utilisation dans les émetteurs. Ils acceptent
parfaitement bien une charge rapide sous 1 C (charge en 1 heure) et une
décharge dans le même temps. Les chargeurs automatiques détectent le
ralentissement de l’augmentation de la tension à pleine charge pour arrêter la
charge ; c’est ce qu’on appelle en jargon la détection du dV/dt. Si le
chargeur est manuel il faut charger à 0,1 C pour éviter les surcharges,
surchauffes et dégradations qui en découlent.
Les accumulateurs
NiCd souffrent de l’effet mémoire, c'est-à-dire la perte de capacité lorsqu’ils
ne sont pas systématiquement complètement déchargés avant d’être rechargés. En
les chargeant avec des chargeurs dits « reflex » qui à période
régulière durant la charge provoquent
une décharge de courte durée à fort courant on limite fortement cet effet.
C’est une technique qui était en particulier utilisée pour les accumulateurs de
satellites. On ne trouve plus, a priori,
de chargeur « reflex » dans le commerce. Heureusement, l’effet
mémoire est réversible. Il suffit d’effectuer quelques cycles de
charge/décharge complète pour régénérer l’accumulateur ; c’est ce que
certains appellent le cyclage. Les chargeurs de milieu et haut de gamme disposent
tous d’une fonction pour cycler les accumulateurs NiCd.
Stockage et entretien
Les NiCd souffrent
souvent (mais pas toujours) d’une autodécharge importante qui peut dépasser 40
% en trois mois. Certains peuvent être presque déchargés au bout d’un
trimestre... Il convient donc de toujours vérifier leur charge avant
utilisation. Par contre, ils supportent bien une décharge profonde, le mieux
est d’ailleurs de les stocker déchargés car ils se conservent mieux dans cet
état.
Bien traités, la
durée de vie de ces accumulateurs est en principe d’environ 800 cycles de
charge/décharge ou environ 5 ans (c’est la plus courte des deux durées qui est
à prendre en compte). Personnellement, je n’ai que rarement pu obtenir de
telles durées de vie avec mes accumulateurs NiCd…
Précautions
Lorsqu’un élément
est en très mauvais état électrique (partiellement ou totalement déchargé) ou
chargé en sens inverse (ce qui peut arriver accidentellement à la décharge dans
un pack très déséquilibré) ils ont tendance à fuir, ce qui provoque une
corrosion discrète (sous l’isolant) mais très grave des fils de liaison qui
peut aller jusqu’à provoquer leur coupure. Il convient donc de surveiller les
liaisons électriques de près pour prévenir les effets en cas de dégradation.
Par ailleurs, comme tous les accumulateurs, il faut empêcher de les laisser trop chauffer, car le risque d’explosion et d’incendie sont bien réels. De plus, ils perdent une bonne partie de leur capacité lorsqu’ils sont très froids. En hiver, on aura donc intérêt à les stocker au chaud (dans une poche par exemple) avant utilisation.
Dernière précaution à prendre et pas des moindres. Lorsque les accumulateurs NiCd sont en fin de vie, il est impératif de les donner à recycler aux points de récupération idoines. Les jeter avec les autres ordures ménagères est très grave en raison de la toxicité du cadmium.
Les accumulateurs Nickel/Métal hydride
Caractéristiques principales
Les accumulateurs Nickel/Métal hydride ou NiMh sont une évolution des NiCd. Ils sont très semblables aux précédents, mais globalement plus performants. Ils fournissent la même tension et sont vendus dans les mêmes formes et dimensions. Leur qualité première est qu’ils ne contiennent pas de métal lourd toxique. Ils remplacent donc presque totalement les NiCd aujourd’hui.
L'anode est constituée d'un hydroxyde de nickel, la cathode d'un hydrure de composé métallique (de constitution chimique variable) et l'électrolyte est de l'hydroxyde de potassium (comme dans le cas des NiCd).
Charge et décharge
Ces accumulateurs peuvent être chargés à 1C (parfois plus). Les éléments destinés à la propulsion (faible résistance interne) peuvent et déchargés en général à 6 C, parfois nettement plus (consulter la documentation de chaque modèle). En décharge à faible courant (chute de tension due à la résistance interne négligeable) la tension passe de 1,2 V par élément à 95 % de la charge maximale à 1,05 V à 5 % de cette charge, comme dans le cas des NiCd.
Les chargeurs
automatiques détectent le dV/dt pour arrêter la charge, comme dans le cas des
NiCd ; bien que cette variation soit moins nette que dans le cas des
accumulateurs NiCd. Si le chargeur est manuel, il faut charger à 0,1 C pour
éviter les surcharges et surchauffes qui en découlent.
Comme les
accumulateurs NiMh souffrent beaucoup moins de l’effet mémoire que les NiCd, la
charge « reflex » ne présente pas d’intérêt et le cyclage est
rarement utile.
Stockage et entretien
L'autodécharge de ces accumulateurs est en général encore pire que celle des NiCd. L’autodécharge des éléments à faible résistance interne (propulsion) est en général nettement plus forte que celle des éléments à forte capacité massique (forte résistance interne). SANYO propose depuis 2007 des éléments nommés ENELOOP en boîtier AA net AAA à autodécharge très réduite (15 % par an) utilisables pour les packs d'émission et réception. Xcell propose un produit équivalent en taille AA nommé « Ready to Use ». GP propose aussi un produit équivalent nommé ReCyko+.
La durée de vie est plus faible que celle des NiCd, mais ils n'ont pas besoin d'être stockés déchargés. D’ailleurs, les fabricants recommandent en général de les stocker chargés.
Précautions
Comme les accumulateurs de type NiCd, il est dangereux de tenter de les décharger trop vite, à moins de très bien les refroidir ou de contrôler leur température. La photo 66 montre ce qui se passe lorsqu’on dépasse les limites. On peut remarquer sur la photo que les barrettes de connexion sont détachées car la soudure a dépassé 250 °C et fondu à cause du phénomène de surchauffe auto entretenu par une réaction chimique après le dépassement d’un seuil critique de température.
Heureusement, contrairement à ce qu’on serait tenté de croire, le mini-drone qui contenait ces accumulateurs a survécu grâce à une intervention très rapide.

Photo 66 : accumulateurs NiMh qui se sont emballés thermiquement
Un élément de plus
pour la route
Du temps du NiMh une erreur était parfois commise lorsqu’on trouvait sa motorisation un peu poussive qui mérite toujours d’être comprise. Elle consistait à ajouter un élément supplémentaire à l’accumulateur NiMh sans rien changer d’autre. Le problème vient du fait que le courant consommé augmente avec le carré de la tension, alors que les pertes Joule déterminant l’échauffement varient avec le carré du courant ; ce qui signifie qu’en fin de compte l’échauffement augmente avec la puissance quatrième de la tension. Autrement dit : lorsqu’on passe de 7 à 8 éléments, la tension augmente d’environ 14 %, mais la quantité de chaleur générée par le moteur est multipliée par 1,7 ! Il n’est pas impossible que le moteur succombe à cet excès ou que l’accumulateur prenne feu. Il ne faut donc prendre aucune liberté avec les limites de tension indiquées sur les moteurs.
Accumulateurs Lithium Ion et variantes
Caractéristiques principales
Ces accumulateurs sont les plus récents et les plus performants. Ils sont à capacité égale typiquement deux fois plus légers que les accumulateurs NiMh. Ils se déclinent maintenant en de nombreuses variantes dont les trois principales (les seules abordées ici) sont Lithium/Ion (LiIo), Lithium/Ion/Polymère (LiPo) et Lithium Phosphate de fer (LiFe). Ils font l’objet de recherches permanentes pour en améliorer les caractéristiques car ce sont les accumulateurs de l’électronique nomade et des appareils électroportatifs (LiFe).
Charge et décharge
La charge des
accumulateurs à base de lithium se fait toujours en deux temps, durant la
première phase la charge se fait à courant constant (1 C pour les LiIo).
Lorsque la tension atteint un seuil critique (4,25 V par élément pour les LiIo)
on continue la charge à tension constante, le courant déclinant alors
progressivement. La pleine charge est obtenue dans ces conditions après environ
90 minutes.
La décharge peut se
faire, sauf exception, sous fort courant ; jusqu’à 35 C dans certains cas,
ce qui va bien au-delà des besoins, même en compétition. Une contrainte (qui ne
concerne pas les LiFe) : on ne peut pas les décharger en dessous d’une
tension critique (2,5 V pour les LiIo), faute de quoi ils sont endommagés.
Stockage et entretien
Ces accumulateurs
ont un très faible taux d’autodécharge. Contrairement aux accumulateurs à base
de nickel il n’est pas nécessaire de les recharger la veille d’une cession de
vol. Par contre, leur durée de vie est en général très faible (deux ans ou
environ 100 cycles de charge/décharge). Cette durée de vie médiocre peut être
significativement améliorée en prenant des précautions de stockage. La durée de
vie est nettement améliorée en stockant ces accumulateurs chargés à 40 % dans
un endroit frais (garage, réfrigérateur ou cave). Le tableau 7 (source Battery
University [22]) donne la perte de capacité permanente en
fonction des conditions de stockage après un an.
|
Température (°C) |
Taux de charge
40 % |
Pleine charge |
|
0 |
2 % |
6 % |
|
25 |
4 % |
20 % |
|
40 |
15 % |
35 % |
|
60 |
25 % |
40 % après 3 mois |
Tableau 7 : perte de capacité permanente après 1 an
selon les conditions
de stockage des accumulateurs LiIo
Précautions
Ces accumulateurs étant sauf exception (LiFe) très sensibles aux surtensions et décharges profondes, ils sont toujours protégés par une électronique adaptée située dans le pack lui-même…sauf dans le cas du modélisme où cette protection crée une gêne du fait des forts taux de décharge. A chaque modéliste donc de prendre ses précautions afin d’éviter les surtensions et tensions basses.
On c’est aperçu que dans un pack les éléments ne sont pas toujours de capacité identique, ce qui fait que l’on peut dépasser le seuil de décharge critique d’un élément, même si le pack n’est pas encore au seuil critique. Par exemple, supposons qu’on dispose d’un pack de deux éléments LiPo en série (2S). Les LiPo ne devant pas être déchargés en dessous de 2,5 V, on arrête la décharge du pack au seuil de 5 V. Mais si les éléments sont déséquilibrés, l’un des éléments peut encore être à 3 V, tandis que l’autre à 2 V est déjà endommagé.
De plus, cette technologie très récente n’est pas encore tout à fait mature. Il est arrivé à plusieurs reprises que des accumulateurs parfaitement utilisés se soient mis en court-circuit provoquant un incendie. Même si c’est un phénomène devenu exceptionnel en 2010, on aura intérêt à stocker ces accumulateurs dans un endroit où ils ne créent pas de risque.
Spécificités des LiIo
Ce sont les accumulateurs des ordinateurs portables, presque délaissés maintenant dans notre loisir, mais à l'origine des autres variantes.
- L'anode est constituée de carbone, la cathode est le plus souvent un oxyde de lithium/cobalt. L'électrolyte est un sel de lithium dans un solvant organique.
- En décharge à faible courant (chute de tension due à la résistance interne négligeable) la tension passe de 3,6 V par élément à 95 % de la charge maximale à 3,2 V à 5 % de cette charge.
- Ils peuvent être chargés à 1C en début de charge, mais le courant doit diminuer au cours de la charge pour ne pas dépasser la tension de charge de 4,25V, ce qui correspond à un temps de charge d'environ 90 mn. Ils peuvent être déchargés à environ 5 C (la limite exacte dépend de la résistance interne).
- L'autodécharge de ces accumulateurs est d’environ 5% par mois.
- On ne doit pas les décharger en dessous de 2,5 V.
- La durée de vie est médiocre. La capacité diminue naturellement avec le temps, même si on ne les utilise pas (voir tableau 7).
Plus encore que les NiMh ils n’aiment pas les mauvais traitements ; ils réagissent a priori en explosant !
Spécificités des LiPo
Ce sont les accumulateurs rois pour la propulsion dans notre loisir. Il s'agit d'une évolution des accumulateurs lithium/ion. Contrairement aux autres types d’accumulateurs, ils se présentent, sauf exception, sous forme d’éléments parallélépipédiques souples (voir photo 67).
- Comme pour les accumulateurs lithium/ion, l'anode est constituée de carbone et la cathode le plus souvent d'un oxyde de lithium/cobalt. L'électrolyte est un film polymère conducteur ionique qui colle l'anode et la cathode l'une sur l'autre.
- En décharge à faible courant (chute de tension due à la résistance interne négligeable) la tension passe de 3,7 V par élément à 95 % de la charge maximale à 3,2 V à 5 % de cette charge.
- Ils peuvent être chargés à 1 C, 2 C ou 5 C selon le type en début de charge, mais le courant doit diminuer au cours de la charge pour ne pas dépasser la tension de 4,25V par élément, ce qui correspond à un temps de charge respectivement d'environ 90 mn , 45 mn ou 18 mn. Ils peuvent être déchargés à 15 C, 25 C, voire 35 C (la limite exacte dépend de la résistance interne).
- L'autodécharge de ces accumulateurs est faible (environ 5% par mois).
- On ne doit pas les décharger en dessous de 2,5 V.
· Lorsqu’ils sont trop chargés ou déchargés, ils se mettent à gonfler. Mais comme les LiIo, ils ont tendance à exploser si on insiste trop.
- La durée de vie est identique à celle des accumulateurs LiIo et le comportement identique aussi car on est en présence de la même chimie.

Photo 67 : accumulateur Lithium Ion/Polymère (photo Weymuller)
Pour éviter les décharges déséquilibrées néfastes voire dangereuses il faut utiliser des éléments appariés en fonction de leur capacité dans les packs (à vérifier dans les packs achetés après décharge précédée d’une charge parfaitement équilibrée). Tous les packs LiPo sont maintenant pourvus de prises d’équilibrage (voir photo 67) pour permettre l’équilibrage. Au moment de la charge on relie les deux connecteurs de l’accumulateur au chargeur/équilibreur qui se charge de maintenir la même tension sur chaque élément du pack tout au long de la charge. Il existe aussi des équilibreurs autonomes qui déchargent les éléments les plus chargés afin de rétablir l’équilibre. On trouve aussi des circuits électroniques à placer dans le modèle et qui surveillent le pack durant le vol. Malheureusement les connecteurs d’équilibrage ne sont pas normalisés, ce qui impose l’utilisation d’adaptateurs. On trouve principalement quatre types de connecteurs en fonction de la marque de l’accumulateur (voir tableau 8).
|
Connecteur |
Marque d’accumulateur |
|
EH |
Kokam, Wellpower, Polyquest (nouveau), FullRiver, XCell, Graupner, Robbe, Simprop |
|
HP |
Hyperion, LiteStorm, Polyquest (ancien) |
|
TP |
Multiplex, FlightPower, Thunder Power |
|
XH |
WellPower, Dualsky |
Tableau 8 : type de connecteur d’équilibrage en fonction de la marque de
l’accumulateur LiPo (source Lindinger Modellbau)
Ces accumulateurs sont proposés en capacités allant typiquement de 110 mAh à 6000 mAh, montés en packs allant de 1S (élément unique) jusqu’à 10S (10 éléments en série). Dans les petites capacités, on ne trouve que 1S à 3S ; seules les très grosses capacités sont proposées en assemblages supérieurs à 6S.
En 2010 on peut classer les LiPo en trois sous classes en fonction de la rapidité de charge possible:
· Charge 1 C : Dualsky XPower GT, Hacker TopFuel, Kokam HD, Thunder Power Prolite-V2 et Propower, Xcell 5C…
· Charge 2 C : Dualsky XPower GT-S, Kokam H5, WellPower SH…
· Charge 5 C : Dualsky XPower EX G5, Hyperion G3 CX et VX, WellPower SH CH5…
En parallèle avec ces accumulateurs plats, KONTRONIC importe toujours des LiPo de marque KONION (origine USA) en boîtier métallique cylindrique, mieux protégés et moins sensibles, mais ils ont peu de succès en raison de leur poids 20 % plus élevé que les LiPo en boîtier parallélépipédique et de l’existence d’une seule taille : 1100 mAh.
Parfois la durée de vie des accumulateurs LiPo ne dépasse pas 75 cycles, ce qui les rend très coûteux à l’usage, mais bien soignés et stockés, leur durée de vie peut être doublée. De plus, Hyperion affirme que ses accumulateurs de troisième génération Hyperion G3 CX et VX durent environ 500 cycles (assertion non vérifiée par l’auteur).
Spécificités des LiFe
Ce sont des accumulateurs intéressants. Il s'agit d'une évolution des précédents visant à gommer les points faibles des accumulateurs LiPo. On les trouve pour notre hobby sous deux formes : parallélépipédiques comme les LiPo (Hacker TopFuel LiFe) ou dans des boîtiers cylindriques façon LiIo en deux capacités : 1100 mAh et 2300 mAh (fabricant A123 Systems, photo 68).
- Comme pour les accumulateurs lithium/ion, l'anode est constituée de carbone. La cathode est en principe un phosphate de fer et lithium.
- En décharge à faible courant (chute de tension due à la résistance interne négligeable) la tension passe de 3,3 V par élément à 95 % de la charge maximale à 2,5 V à 5 % de cette charge.
- Ils peuvent être chargés à 4 C et déchargés à 35 C.
- L'autodécharge est a priori faible et ils sont en principe capables de supporter une décharge profonde.
- La durée de vie devrait être de l’ordre de 1000 cycles selon A123 Systems.

Photo 68 : accumulateur LiFe A123 (photo Lindinger Modellbau)
Ces accumulateurs ont en principe beaucoup moins tendance à exploser que les LiIo ; pourtant on trouve chez A123 Systems un clapet de sécurité du coté de la cathode pour laisser échapper les gaz… On remarquera par ailleurs sur les éléments de A123 Systems que la cathode a l'aspect de l'anode d'une LiIo (ces deux types d'accumulateurs utilisent les mêmes boîtiers cylindriques), donc gare aux inversions de polarité si on fabrique ses packs soi-même.
Le point faible des LiFe en 2010 reste le poids : 1,3 fois plus élevé que les LiPo pour A123 Systems et 1,15 fois plus élevé pour Hacker TopFuel LiFe.
Point important sur les accumulateurs
Le point commun de tous ces accumulateurs est qu’ils ont une résistance interne qui provoque une chute de tension qui atteint environ 10 % de la tension nominale au courant de décharge maximale. Comme ça a déjà été signalé, outre le fait que ça diminue la tension disponible, ça génère aussi un échauffement potentiellement dangereux dont les effets possibles ont été décrits dans ce paragraphe. Donc, on ne le répétera jamais assez : il faut absolument une bonne ventilation pour les accumulateurs s’ils sont utilisés de façon intensive.
Les chargeurs
Un accumulateur est
un « réservoir d’énergie électrique » qui se vide dans le moteur
électrique ou l’électronique de la radio. On le remplit à nouveau à partir du
réseau électrique alternatif chez soi ou
à partir d’une batterie au plomb 12 V sur le terrain.
Les fonctions des chargeurs
La fonction
première, évidente, d’un chargeur est donc de charger les accumulateurs qu’on
lui confie, mais ce n’est souvent pas la seule, car on peut aussi lui demander
de fournir des informations sur l’accumulateur connecté :
·
son état
de charge,
·
sa
capacité,
·
sa
tension, voire la tension de chaque élément pour révéler un éventuel
déséquilibre,
·
sa
résistance interne, voire celle de chaque élément,
·
sa
température (à l’aide d’un capteur de température ajouté),
·
son type
et son historique (nombre de cycles, date de mise en service..) à l’aide d’une
puce BID (Battery IDentificator system) liée à l’accumulateur.
Les informations recueillies et d’autres
critères peuvent conduire à prodiguer des soins en fonction du type
d’accumulateur :
·
désulfatation
(batterie au plomb),
·
cycles
de charge/décharge pour supprimer l’effet mémoire (accumulateurs NiCd et dans
une moindre mesure NiMh),
·
charge
reflex pour prévenir l’effet mémoire (accumulateurs NiCd),
·
équilibrage
des éléments (accumulateurs LiIo, LiPo, LiFe),
·
charge à
40 % (en vue du stockage des LiIo et LiPo).
On imagine assez
facilement que deux types de sources d’énergie (220 V alternatif ou 12 V continu),
six types d’accumulateurs (Pb, NiCd, NiMh, LiIo, LiPo, LiFe), six informations
diverses et cinq types de soins possibles conduisent à une pléthore de
chargeurs dont pas deux n’ont les mêmes caractéristiques, fonctions et
possibilités. Les chargeurs du commerce, dont la plage de prix va de moins de
20 € jusqu’à plus de 300 €, ne vont donc pas être présentés en détail ici, mais
seulement ce qu’on peut attendre d’eux en fonction de leur gamme de prix. A
chacun de faire son choix ensuite en fonction de ses besoins, désirs, moyens
financier et de l’offre commerciale du moment.
Les divers types de chargeurs
Pour les accumulateurs
des émetteurs et récepteurs on utilise le plus souvent des chargeurs
spécialisés dans le NiCd et NiMh fonctionnant sur le réseau alternatif, car il
n’y a pas a priori de raison de
recharger ces éléments sur le terrain. On trouve deux variantes :
·
les
chargeurs automatiques qui règlent eux même le courant et s’arrêtent en fin de
charge.
·
Les
chargeurs manuels qui fournissent un courant fixe, charge à l’utilisateur
d’arrêter la charge au bon moment.
Comme les chargeurs
manuels sont moins sûrs et au même prix (typiquement moins de 20 €) que les
chargeurs automatiques, il n’y a plus de raison en 2010 de se contenter de
chargeurs manuels.
Pour les accumulateurs
de propulsion on préfère des chargeurs fonctionnant sur batterie au plomb
12 V. Quatre chargeurs sélectionnés dans le catalogue en ligne de Lindinger
Modelbau sont présentés ici pour illustrer ce qu’on peut attendre dans chaque
gamme de prix.
·
Sous la
barre des 20 € le choix est très limité, mais on peut déjà trouver des
chargeurs spécialisés suffisants pour les besoins de base. La photo 69 montre
un chargeur 12 V Graupner capable des charger et équilibrer des accumulateurs
LiPo jusqu’à 4S et 3 A ; mais il ne fournit aucune information.
·
Sous la
barre des 40 € on commence à trouver des chargeurs capables de charger
plusieurs types de batteries. La photo 70 montre un chargeur mixte 12 V / 220 V
Robbe capable de charger et équilibrer des accumulateurs NiMh et Lipo jusqu’à
4S et 3 A. Ce type de chargeur satisfait bien les besoins de base. Il donne la
tension, le courant et la charge de l’accumulateur chargé.
·
Sous la
barre des 80 € on trouve des chargeurs/déchargeurs équilibreurs avec de très
nombreuses possibilités, suffisants dans la plupart des cas. La photo 71 montre
un chargeur/déchargeur équilibreur 12 V Multiplex Pb/NiCd/NiMh/LiIo/LiPo/LiFe
chargeant jusqu’à 6 LiPo en série sous 6 A.
·
Au
dessus de 80 € on trouve des chargeurs multiples (deux ou trois chargeurs
incorporés dans le même boîtier), à fort courant et tension pour les gros
accumulateurs (ne pas oublier que pour charger un accumulateur LiPo 4000 mAh
sous 5C il faut 20 A), avec fonction BID (chez Robbe), interface PC, etc.. La
photo 72 montre le chargeur universel 12 V Robbe Power Peak Infinity qui monte
à 60 V (14S LiPo) et 20 A, avec système BID et un interface pour ordinateur.


Photo 69 : chargeur Graupner LiPo d’entrée de gamme Photo 70 : chargeur Robbe
multifonctions d’entrée de gamme


Photo 71 : chargeur Multiplex multifonctions Photo 72 : chargeur
Robbe universel à forte capacité
Les accessoires
Les accessoires
permettent d’étendre les possibilités d’un chargeur, ou pallier à quelque
fonction manquante. Voici la description de quelques uns des ces accessoires
parfois très utiles.
·
Adaptateur 220 V / 12 V pour utiliser à la maison un chargeur de
terrain. Cet accessoire n’est pas très cher et vendu en magasin de modélisme.
Toutefois, certains préfèrent aller les chercher dans les magasins de cibistes
(ou d’accessoires automobile) car on y trouve des adaptateurs de forte
puissance (20 A) bon marché. Ceux qui sont bricoleurs récupèrent des anciennes
alimentations de PC en y ajoutant deux fiches banane femelles de diamètre 4 mm.
Une autre solution intéressante jusqu’à 2 A consiste à faire un adaptateur qui
se branche sur une alimentation d’ordinateur portable. Comme ces alimentations
fournissent plus de 12 V, on met des diodes en série entre la prise Jack Alim
du chargeur et les fiches banane afin de faire tomber la tension sous 15 V
(chaque diode fait chuter la tension de 0,65 V).
·
Adaptateur pour allume cigare. Cet accessoire assez facile à trouver est
bien pratique pour ne pas avoir à soulever le capot de sa voiture si on veut
s’y brancher.
·
Équilibreur LiPo. Cet accessoire permet de mettre à niveau les anciens chargeurs qui ne
disposent pas de cette fonction indispensable en LiPo.
·
Déchargeur NiCd. Cet accessoire est bien pratique
pour décharger et supprimer l’effet mémoire des anciens accumulateurs NiCd.
Les variateurs et contrôleurs
Variateurs pour moteurs à courant continu à balais
Pour régler la
vitesse des moteurs à balais on utilise des hacheurs appelés dans le cadre du
modélisme le plus souvent « variateur ». Le principe du hacheur est assez simple. Un
transistor qui fonctionne comme un interrupteur électronique alimente par
impulsions à fréquence fixe (de l’ordre de 20 kHz) le moteur. En faisant varier
le temps de conduction du transistor de 0 % jusqu’à 100 % en fonction des
ordres du manche de gaz on fait voire au moteur une tension moyenne variant de
0 V jusqu’à la tension de la batterie. Comme le régime de rotation d’un moteur
à courant continu est proportionnel à la tension moyenne qu’on lui applique, on
règle donc son régime de rotation. Le principe est simple et efficace. Il pose
quand même un problème, car ce découpage génère d’importants parasites
susceptibles de perturber le récepteur de radiocommande. Ce problème est traité
au chapitre sur la radiocommande.
Comme on n’utilise
plus guère les moteurs à balais en modélisme, les variateurs correspondants
sont devenus assez difficiles à trouver.
Contrôleurs pour moteurs à courant continu sans balai
(brushless)
Un moteur sans balai
(bruhless) utilise trois bobines et il faut commuter le courant ainsi que son
sens périodiquement d’une bobine à l’autre. Cette fonction de commutation est
assurée par six transistors de commutation (voir photo 74) qui assurent aussi
la fonction de hachage décrite pour les moteurs à balais. Pour cette raison les
variateurs de vitesse pour moteur brushless sont en général nommés contrôleurs
(ESC pour Electronic Speed Controller en anglais), ce qui évite la confusion
avec les variateurs pour moteurs à balais.
Il y a une kyrielle
de contrôleurs pour moteur brushless, mais on peut aussi préférer faire les
siens soi-même comme Jo Aichniger [24], surtout si on a
aussi réalisé soi-même son moteur. La photo 73 montre le dessus de la carte du
contrôleur SBL-MEGA-40A de sa conception avec le microcontrôleur (µC en abrégé)
qui gère tout (circuit carré) et le condensateur de filtrage cylindrique
(réservoir électronique) à l’extrême gauche destiné à absorber les pointes de
courant demandées par le contrôleur. La photo 74 montre le dessous de la carte
avec les six transistors de commutation qui doivent être bien refroidis.

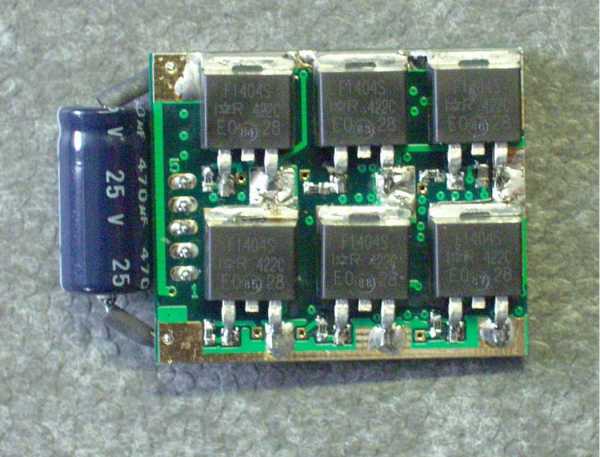
Photo 73 : côté µC du contrôleur SBL-MEGA-40A Photo 74 : côté
transistors de commutation du même contrôleur
Tous les contrôleurs
sont gérés par un microcontrôleur, ordinateur sur une puce qui fonctionne à
l’aide d’un programme qui commande les transistors en tenant compte de
paramètres choisis par l’utilisateur. Ces paramètres sont modifiables à la mise
sous tension en suivant une procédure assez rébarbative en jouant sur le manche
de gaz, ou en utilisant une carte de programmation (photo 75) en déplaçant des
cavaliers.

Photo 75 : carte de programmation pour contrôleur JETI
(photo Lindinger Modellbau)
Les principaux
paramètres de programmation sont :
·
Le type d’accu (LiPo, LiFe, NiMh) : information dont le contrôleur a besoin pour
savoir à partir de quelle tension il doit réduire le régime du moteur pour
avertir le pilote de la fin de décharge de la batterie.
·
Frein (brake) (actif, faible ou inactif) : la position du manche donne la
vitesse du moteur dans le mode traction,
mais on aura un effet de roue libre dans le mode récupération (descente) si le frein électronique n’est pas activé.
·
Tension de coupure (Cut Off Voltage). C’est la tension relative (haute, moyenne ou basse) à
partir de laquelle on avertit le pilote de la fin de décharge. Une valeur forte
fait perdre un peu de capacité, mais permet d’éviter les dommages à un élément
faible dans un pack LiPo déséquilibré. Avec des NiCd on peut prendre une valeur
basse, tandis qu’avec des vieux accumulateurs LiPo on prendra impérativement
une valeur forte.
·
Timing (hard = high, middle ou soft = low). Il s’agit ici du réglage du temps
d’avance à la commutation des bobines. Pour que le moteur tourne bien, il faut
anticiper le moment de commutation, et ce d’autant plus que le moteur a de
pôles. On prend typiquement un timing high (forte avance) pour les outrunners
et un timing low (faible avance) pour les inrunners. Il est parfaitement
loisible d’essayer plusieurs valeurs pour trouver celle que l’on préfère.
·
Type de coupure (Cut Off Mode), hard ou soft. Ce régalge définit la façon dont le
contrôleur diminue le régime du moteur lorsqu’il détecte une tension basse sur
l’accumulateur. En mode hard, le moteur s’arrête presque instantanément. C’est
la valeur à choisir absolument avec les hélicoptères pour donner du piment aux vols !
·
Accélération (high, medium ou low). Le contrôleur réagit avec un décalage aux
sollicitations du manche de gaz afin de limiter les appels de courant à
l’accélération ; un appel de courant trop fort pouvant faire disjoncter le
contrôleur. Il faut choisir la valeur d’accélération la plus faible compatible
avec son mode de pilotage et toujours prendre la valeur la plus basse avec un
hélicoptère à cause de l’inertie du rotor.
·
Sens de rotation : permet de choisir le sens de rotation du moteur. Tous les contrôleurs
ne disposent pas de cette fonctionnalité. En absence de ce réglage il faut
permuter deux fils entre le moteur et le contrôleur pour changer le sens de
rotation.
·
Régulation de vitesse. Seuls les contrôleurs pour hélicoptère ont
cette fonctionnalité. Elle permet d’éviter la baisse de régime au fur et à
mesure de la décharge de l’accumulateur de propulsion, ce qui est utile avec
les hélicoptères qui doivent conserver une vitesse de rotation du rotor
principal constante.
Le circuit BEC
L’acronyme BEC
signifie Battery Eliminator Circuit, c'est-à-dire circuit d’élimination de
batterie (de réception). En effet, un contrôleur permet en général de se passer
de batterie de réception, la batterie de propulsion en faisant office grâce à
un régulateur 5 V intégré au contrôleur. Les régulateurs classiques sont des
circuits intégrés spécialisés linéaires qui font chuter la tension de
l’accumulateur de propulsion jusqu’à 5 V. Un régulateur débite 1 A, assez pour
deux servos moyens ou quatre micro servos. Dans la photo 73 on peut voir deux
de ces régulateurs (gros circuits rectangulaires en haut et en bas de la
photo). On en met en général plusieurs en parallèle en fonction du nombre de
servos qu’on veut pouvoir piloter.
L’inconvénient de ce
dispositif est qu’il dissipe beaucoup de chaleur. En effet, si les servos
consomment à un moment 2 A et que la tension de l’accumulateur est de 11,1 V,
c’est (11,1 – 5) x 2 = 12,2 W qui sont dissipés, ce qui représente beaucoup de
chaleur. Pour cette raison on renonce en général aux circuits BEC pour les
contrôleurs prévus pour être alimentés par des accumulateurs de plus de 15 V.
On parle alors de contrôleurs OPTO (car on utilise un optocoupleur au niveau de
l’entrée de commande) et il faut alors utiliser un autre moyen pour alimenter
la radio.
Toutefois, il existe
aujourd’hui des contrôleurs utilisant un hacheur comme dans les variateurs pour
moteur à balais pour générer la tension du récepteur. Comme il n’y a que très
peu d’échauffement dans ce cas, il n’y a plus de limite de tension
d’alimentation. Ces hacheurs sont mentionnés comme SBEC (pour Switched BEC)
dans certaines notices. Ils ne sont pas toujours appréciés, car on leur
reproche de générer beaucoup de parasites. En tout état de cause il faudra
prendre des précautions au câblage (voir chapitre radiocommande) et faire des
tests de portée soignée.
On vend maintenant
dans le commerce modéliste des hacheurs indépendants appelés
« régulateurs » pour générer le 5 V théorique, en général réglable à
une valeur un peu plus forte mais inférieure à 6 V. Ils permettent d’éviter les
accumulateurs de réception dans le cas de l’utilisation d’un contrôleur OPTO.
Ils permettent aussi d’utiliser des accumulateurs LiPo de 7,2 V comme batterie
de réception.
Caractérisation du système de propulsion électrique
Nous allons choisir ici l’ensemble moteur, contrôleur et accumulateur, toujours en prenant comme exemple notre « mini F3A ».
La première chose à faire est de choisir le type et la tension de l’accumulateur, même s’il faut par la suite revenir sur ce choix en fonction du moteur trouvé. Nous allons opter dans cet exemple pour le type le plus classique d’accumulateurs, à savoir des LiPo.
Pour décider du nombre d’éléments il n’y a pas de règle bien précise. Comme base de départ on prend deux éléments pour les indoor, trois éléments pour les parkfliers et les petits modèles, quatre éléments pour des modèles jusqu’à deux kilos. Au-delà on prend cinq ou six éléments, et si nécessaire jusqu’à dix éléments pour très grands modèles. Ce choix se fait en sachant qu’il faut alors trouver un contrôleur avec SBEC, ajouter un régulateur externe à un contrôleur OPTO ou utiliser une batterie de réception indépendante. Une fois le nombre d’éléments choisi on cherche le moteur approprié. S’il demande un nombre d’éléments différent de celui pris a priori on change le nombre d’éléments car Il faut de préférence prendre le nombre maximum d’éléments autorisés par le moteur pour ne pas le sous utiliser, ce qui conduirait à choisir un moteur inutilement lourd.
Prenons donc 4S a priori. Notre tension d’alimentation nominale U est alors de 3,7x4 = 14,8 V.
Pour choisir le moteur, on procède comme avec les moteurs thermiques en calculant la puissance maximale nécessaire en montée à vitesse réduite. Il suffit donc d’utiliser l’équation 13 en prenant f = 1. Si la puissance mécanique du moteur n’est pas donnée on pourra dans le cas d’un outrunner utiliser le tableau 9 (valable uniquement si le moteur est utilisé au régime maximum) extrait d’une documentation TORCMAN. Ce tableau regroupe les dimensions les plus courantes de moteurs et les puissances qu’il affiche sont dans la moyenne de ce qui est annoncé par les divers constructeurs. Il faut en effet savoir que dans le cas des moteurs outrunners la masse détermine à mieux que 5 % près la puissance réelle, ce qui n’est pas le cas de la puissance affichée par les constructeurs car tout dépend de la façon dont chaque moteur est refroidi durant les essais ; certains constructeurs ayant tendance à être optimistes pour mettre leur produit en avant contrairement à d’autres plutôt conservatifs pour ne pas voir de moteur grillé revenir à l’usine…
De nombreux constructeurs donnent le courant maximum acceptable à la place de la puissance. Il faut dans ce cas adapter la formule 13 car nous cherchons alors le courant I et nous raisonnons en puissance électrique Pe (c'est-à-dire amont) et non mécanique Pm (c'est-à-dire aval). Cela nous oblige à tenir compte du rendement ηm estimé du moteur. L’équation 21 déduite directement de l’équation 13 nous donne ce courant I.
|
Diamètre stator (mm) |
Longueur stator (mm) |
Puissance
continue Maximale (W) |
Masse Approximative
(g) |
|
28 |
5 |
100 |
55 |
|
28 |
10 |
150 |
80 |
|
28 |
15 |
250 |
106 |
|
28 |
20 |
350 |
132 |
|
35 |
12 |
350 |
162 |
|
35 |
20 |
600 |
223 |
|
35 |
28 |
900 |
278 |
|
43 |
20 |
1000 |
370 |
|
43 |
30 |
1800 |
500 |
Tableau 9 : puissance mécanique des moteurs électriques outrunners
![]() (21)
(21)
Dans cette équation
I est le courant du moteur en A, Vm la vitesse de montée en m/s, Ft la force de
traction, U la tension aux bornes du moteur, h le rendement de l’hélice et hm le rendement du moteur.