Aéromodélisme RC
Techniques et conception

L’hélicoptère RC
Lien vers « Sauver un animal »
Auteur : Philippe Kauffmann
Version initiale : 16 octobre 2011
Dernière révision : 16 octobre 2011
Photos : constructeur ou auteur, sauf mention contraire
Sommaire
Principe
général de fonctionnement
Contrôle du rotor principal
Contrôle de l’axe de lacet
L’hélicoptère représente un cas à part dans le monde de la RC. Contrairement aux avions et planeurs, on ne les conçoit plus et on ne les construit plus soi-même depuis longtemps ; on se contente d’acheter des boîtes d’hélicoptère plus ou moins gros et plus ou moins pré-assemblé à partir de pièces mécaniques usinées ou moulées. L’outil d’assemblage n’est plus la colle, mais le tournevis.

Photo 1 : boîtes d’hélicoptère électrique de taille 450 de Taiwan (boîte en couleur) et Chine Populaire (boîte blanche)
Les hélicoptères traditionnels (le terme est explicité au chapitre « Principaux types ») sont classés par taille (classe) de très petit à très gros. En propulsion électrique, un hélicoptère de classe 250 est très petit (environ 350 g en ordre de vol) et un hélicoptère de classe 700 est très gros (environ 5 kg en ordre de vol). Les classes les plus courantes sont 250, 450, 500, 600 et 700. La classe la plus représentée est la classe 450 (environ 750 g en ordre de vol et diamètre de rotor principal 70 cm), et le modèle probablement le plus vendu est le TREX 450 du Taiwanais ALIGN car on trouve très facilement des pièces de rechange peu chères. La facilité de trouver des pièces de rechange bon marché est essentielle, car comme pour le reste de l’aéromodélisme on casse beaucoup, mais contrairement aux autres domaines, il faut à chaque fois changer les pièces endommagées ; pas question de recoller ou réparer. Un kit complet (dit combo kit) sans radio mais avec servos, moteur, contrôleur et gyroscope de TREX 450 vaut environ 400 €, et ce prix dépasse largement 2000 € pour les gros hélicoptères ; c’est donc un loisir onéreux. Les hélicoptères étant vendus en boîte, ils sont présentés ainsi ici (photo 1) comme le mouton du Petit Prince. Sur la photo 1 on peut voir posée sur la boîte du TREX 450 l’équivalent de Chine Populaire vendu moins de 35 € (sans moteur, contrôleur, servos ni gyroscope) ; ce qui justifie l’engouement pour le modèle.
Principe général de fonctionnement
La photo 2 présente un mélange assemblé du contenu des deux boîtes de la photo 1. On y reconnaît le rotor principal tournant selon un axe vertical qui assure la sustentation de l’hélicoptère. Ce rotor tourne en principe à vitesse constante (environ 3200 t/mn pour un classe 450), comme le rotor anti-couple placé à l’arrière. Tout le contrôle de l’hélicoptère est donc basé sur la modification des pas des pales de ces deux rotors. Contrairement à ce qu’on observe souvent pour les hélicoptères « grandeur », les deux rotors sont munis de seulement deux pales opposées, afin de simplifier la mécanique.
Lorsqu’on agit sur la commande de gaz/pas on modifie simultanément le pas des deux pales du rotor principal (dit pas collectif) sans modifier le régime de rotation, ce qui fait monter ou descendre l’hélicoptère.
Lorsqu’on agit sur la commande de longitudinal (profondeur d’un avion ou planeur), on modifie le pas de la pale à l’avant de l’hélicoptère par rapport à celui de celle à l’arrière, ce qui incline l’hélicoptère vers l’avant ou l’arrière et permet d’avancer ou reculer. Lorsqu’on agit sur la commande de latéral (ailerons d’un avion ou planeur), on modifie le pas de la pale à gauche par rapport à celui de la pale à droite, ce qui permet d’incliner latéralement l’hélicoptère et d’induire un déplacement latéral. Comme ces deux dernières commandes modifient de façon cyclique le pas de chaque pale en fonction de leur position angulaire, on parle de commande de pas cyclique. En fait, comme l’hélicoptère ne jouit pas d’une bonne stabilité angulaire, on utilise une astuce. Le pas cyclique est partiellement contrôlé par la barre de Bell-Hiller qui agit comme un gyroscope. Si le plan des pales s’incline par rapport à celui de la barre, la barre agit sur le pas cyclique par l’intermédiaire d’un jeu de leviers et tringles. La commande des servos, elle, agit en partie directement sur le pas des pales et en partie via la barre de Bell-Hiller en induisant une torsion sur la barre pour que les palettes de Hiller agissant comme des ailettes modifient le plan de rotation de la barre.

Photo 2 : TREX 450 en ordre de vol
Comme le rotor principal induit en réaction un couple de rotation selon l’axe de lacet, il faut impérativement un second rotor placé sur un axe horizontal au bout du tube de queue dit rotor anti-couple pour l’annuler et empêcher la rotation de l’hélicoptère sur lui-même. Une commande selon l’axe de lacet modifie le pas collectif du rotor de queue et induit donc un changement d’orientation de l’hélicoptère par rotation. L’hélicoptère n’étant pas non plus très stable selon cet axe, on agit aussi indirectement. Le pas du rotor anti-couple est contrôlé par un gyroscope électronique placé dans l’hélicoptère, et l’ordre de pilotage agit sur le gyroscope pour lui transmettre une consigne de vitesse de rotation. Le manche de direction est utilisé pour le contrôle de cet axe.
L’hélicoptère dispose aussi d’un carénage aussi parfois appelé bulle pour faciliter sa visualisation et d’un train d’atterrissage qui doit impérativement être agrandi pour les débuts afin d’empêcher le risque de basculement à l’atterrissage toujours catastrophique (bris de pales et endommagement de l’axe principal de rotor assurés). Un train agrandi « fait maison » à croisillon à peine visible sur la photo 2 est présenté sur la photo 3 (c’est la seule chose qui reste à réaliser dans un hélicoptère…). Il est fabriqué dans le cas présent en tubes carbone de 50 cm de long et 5,5 mm de diamètre à l’extrémité desquels ont été collées quatre balles de ping-pong.

Photo 3 : train à croisillons de début
Les principaux types
Le paragraphe précédant présente l’hélicoptère « typique », plus ou moins conforme aux hélicoptères grandeur et premiers hélicoptères RC. Mais le monde du commerce de loisir nous offre aujourd’hui une grande variété de modèles de moins de 30 g à plus de 5 kg qui divergent plus ou moins du principe évoqué au paragraphe précédant.
Le premier type d’hélicoptère contrôlable (terme choisi à dessein par opposition à certains jouets à peu près incontrôlables diffusés dans le commerce), idéal pour débuter est le micro-hélicoptère à deux rotors coaxiaux contrarotatifs. La photo 4 représente un de ces modèles proposé par E-Flite et vendu en ordre de vol avec ou sans émetteur radio (prévoir dans ce dernier cas au moins 65 € pour une radio SPEKTRUM (marque obligatoire pour des raisons de compatibilité avec le récepteur) non programmable ou 120 € pour une programmable). Sa masse de 28,5 g et son extrême stabilité naturelle lui permettent un usage sans problème à l’intérieur d’un domicile sans entraînement particulier. La stabilité latérale est assurée par une barre de Bell (barre de Bell-Hiller sans palettes d’action sur le plan de rotation) contrôlant le rotor supérieur. La stabilité en lacet est assurée par un gyroscope électronique classique. On fait tourner l’hélicoptère selon l’axe de lacet en faisant varier la vitesse de rotation relative des deux rotors. Les contrôles en roulis et tangage sont obtenus par action directe sur le pas cyclique du rotor inférieur. Comme il n’y a pas de pas collectif, les montée et descente sont obtenues par la variation simultanée du régime de rotation des deux rotors. Ce type d’hélicoptère est parfait en intérieur, mais inutilisable en extérieur car embarqué par la moindre brise.

Photo 4 : Hélicoptère E-Flite mcx2 à rotors contrarotatifs (photo Speed-RC [1])
Le second type d’hélicoptère que l’on voit assez couramment est d’une complexité intermédiaire entre l’hélicoptère classique et à rotors contrarotatifs. L’idée est d’utiliser la variation de régime du rotor principal et de queue pour assurer le contrôle dans la direction verticale et la rotation selon l’axe de lacet. La photo 5 présente le 120-SR hélicoptère de 105 g de ce type vendu tout monté avec ou sans radio. Ce type d’hélicoptère est plus manoeuvrant que les hélicoptères à rotors contrarotatifs, mais a un temps de réponse nettement supérieur à celui des hélicoptères à pas variable à cause de l’inertie des moteurs. C’est un intermédiaire en terme de difficulté de pilotage entre les deux premiers types d’hélicoptère.

Photo 5 : hélicoptère E-Flite 120-SR à pas fixe (photo Speed-RC [1])
Les premiers hélicoptères RC utilisaient des moteurs à explosion. Ce type de motorisation est encore très utilisé pour les gros hélicoptères à cause du coût prohibitif des grosses propulsions électriques. L’intérêt des gros hélicoptères est leur inertie plus grande qui facilite significativement le pilotage. Si ces gros hélicoptères ne sont pas recommandés pour débuter, c’est principalement à cause du budget « pièces de rechange ». Ces hélicoptères à propulsion « thermique » se raréfient petit à petit à cause du bruit, de la saleté engendrée, des difficultés de démarrage et du risque de caler en vol.
La tendance de l’hélicoptère RC va dans le sens de la généralisation de la stabilisation électronique à l’aide d’un gyroscope trois axes (qui mesure et corrige selon les trois axes), ce qui améliore significativement la stabilité comme la maniabilité. On parle alors en général d’hélicoptère « Flybarless » car il n’y a alors plus besoin dans le cas de la stabilisation électronique de barre de Bell-Hiller. La photo 6 du Logo 500 de Mikado (masse 3 kg) montre un hélicoptère équipé ainsi. On voit aussi de plus en plus de caméras visant le sol et permettant de tenir de façon automatique le stationnaire. La photo 7 montre le dispositif commercialisé par HobbyKing qui regroupe un gyroscope trois axes et une caméra pour environ 50 €, ce qui est susceptible de rendre le dispositif attractif pour de nombreux modélistes.

Photo 6 : Logo 500 de Mikado en Flybarless (photo Lindinger Modellbau [2])

Photo 7 : système de stabilisation Flymentor : gyro 3 axes plus caméra de stationnaire (photo HobbyKing [3])
Sructure
Les éléments de l’hélicoptère sont articulés autour du châssis (voir photo 8). Le châssis est parfois en alliage d’aluminium, parfois en plastique injecté et parfois en feuille de composite carbone découpé au laser comme sur la photo 8. Dans le cas de modèles très répandus comme le TREX 450 on trouve des pièces métalliques et des châssis en composite carbone comme pièce de rechange pour remplacer les pièces en plastique injecté.
Les pales sont aujourd’hui le plus souvent en composite carbone, mais on trouve encore, bien qu’assez rarement, des pales en bois ; elles sont à éviter car le bois peut se fendre au niveau du trou de fixation et la pale risque alors de se détacher. Dans certains kits il y a aussi des pales en plastique injectées. Elles ne valent que comme premières pales à casser car le matériau a tendance à se déformer avec le temps, ce qui est assez gênant pour des pales.
Les carénages son parfois en plastique moulé, parfois en composite fibre de verre. Ce second matériau est nettement préférable car plus léger et plus résistant.
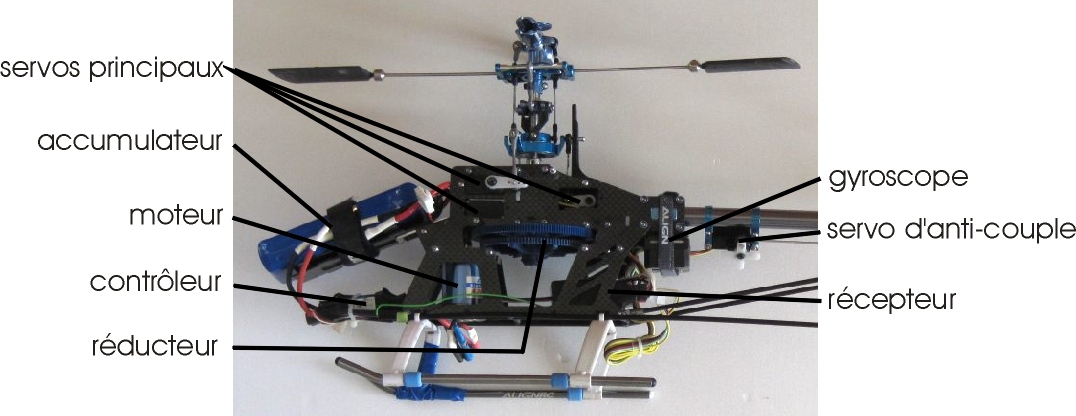
Photo 8 : châssis classe 450 en feuille de composite carbone
L’accumulateur LiPo placé à l’avant fournit la source d’énergie. Accessoirement il assure aussi le centrage car le centre de masse doit être situé exactement sur l’axe du rotor principal pour faciliter le stationnaire.
Le contrôleur gère la puissance fournie au moteur. Dans le cas d’un contrôleur basique, il faut augmenter légèrement les gaz avec le pas pour que le régime reste constant. Si le contrôleur dispose d’un mode spécial hélicoptère avec régulation de vitesse (governor en anglais), il faut au contraire maintenir une commande de gaz fixe quel que soit le pas. Un contrôleur avec mode spécial hélicoptère est toujours préférable, car il dispose en plus d’une limitation de la vitesse d’augmentation de régime au départ, ce qui est souhaitable en raison de l’inertie de la tête de rotor. Si on utilise une propulsion thermique il faut utiliser une radio programmable avec courbe de gaz afin de pouvoir régler finement les gaz en fonction du pas pour maintenir un régime rotor constant. Il existe des régulateurs pour moteur thermique qui mesurent le régime du rotor et contrôlent les gaz en conséquence, ce qui simplifie la commande de gaz.
Dans tous les cas il faut une radio avec mode hélicoptère qui permet à partir du manche unique de gaz/pas de générer les deux commandes :
· commande linéaire du pas,
· commande non-linéaire des gaz.
Le moteur électrique, toujours de type brushless − sauf pour les très anciens modèles − entraîne l’axe principal du rotor par l’intermédiaire d’un train d’engrenages réducteur, en général doté d’une roue-libre pour permettre l’autorotation. L’autorotation découple le rotor du moteur lorsque celui-ci s’arrête suite à une panne ou un arrêt volontaire, ce qui permet d’atterrir en utilisant le fonctionnement en roue-libre du rotor qui continue à tourner sur son inertie. Durant cette phase de vol, le rotor de queue normalement entraîné par la grande roue du réducteur est arrêté car il n’y a plus de couple dû au rotor principal.
Le nombre de dents du pignon du moteur peut en général être modifié (plusieurs pignons disponibles, 11 à 15 dents dans le cas du TREX 450), ce qui permet d’ajuster finement le rapport de réduction en fonction de l’altitude du site de vol, des pales, de la caractéristique Kv du moteur (voir chapitre propulsion) et de l’accumulateur de propulsion.
Le mouvement de rotation du rotor d’anti-couple (rotor de queue) est transmis du réducteur à la queue, soit par un tube de torsion qui tourne dans le tube de queue avec un renvoi d’angle à 90° à engrenages à chaque extrémité, soit par une courroie crantée enfermée dans le même tube de queue.
Le système de contrôle
Un récepteur avec minimum cinq voies, mais souvent six assure la commande du contrôleur du moteur, des trois servos du rotor principal, du servo de queue via le gyroscope et éventuellement le mode de fonctionnement du gyroscope via une voie annexe.
Contrôle du
rotor principal
Sur les hélicoptères récents le pas des pales du rotor principal est contrôlé par trois servos principaux qui inclinent et lèvent ou baissent un plateau cyclique. Lorsque les trois servos agissent en parallèle, le plateau monte ou descend, on agit alors sur le pas collectif. Lorsque les deux servos avant montent et le servo arrière descend (ou le contraire) on agit sur le cyclique longitudinal. Typiquement, lorsque le servo arrière monte on provoque une inclinaison vers l’avant. Lorsque le servo avant droit descend et le servo avant gauche monte (ou le contraire) sans déplacement du servo arrière on agit sur le cyclique latéral. Typiquement, lorsque le servo droit baisse et le gauche monte, on provoque une inclinaison vers la droite.
La photo 9 montre une tête de rotor principal d’un TREX 450. On peut observer de bas en haut les trois servos de commande qui pilotent le plateau cyclique. La moitié basse du plateau peut monter et s’incliner, mais pas tourner sur elle-même à cause de support anti-rotation. La partie haute du plateau cyclique suit la partie basse, mais tourne en plus avec l’axe du rotor principal et commande le support de barre de Bell-Hiller (en plus du pas des pales) qui peut tourner selon deux axes mais pas se déplacer linéairement. Le support de barre de Bell-Hiller commande finalement en incidence chaque pale.
N. B. : il est essentiel de ne pas chercher à comprendre le fonctionnement exact de chaque tringle et levier sous peine de risquer de provoquer des dommages irréversibles à certains neurones ; d’ailleurs certains modélistes affirment que le système « flybarless » a été inventé par les entreprises qui ont perdu la formule du système « barre de Bell-Hiller ». D’autres disent que les ingénieurs Bell et Hiller sont devenus fous en essayant de comprendre le fonctionnement de leur invention, mais certains affirment – au contraire − que c’est parce qu’ils étaient fous avant qu’il on pu inventer ce système.
Plus sérieusement, si on veut analyser le fonctionnement du système − ce qui est en tout état de cause possible bien qu’assez difficile − il faut avoir en tête que la barre de Bell-Hiller agit comme un gyroscope et qu’elle est donc soumise à la précession gyroscopique. Ce phénomène pas du tout intuitif est parfaitement expliqué dans les ouvrages de physique de premier cycle universitaire ainsi que dans d’autres ouvrages sur la mécanique générale (voir [4] et [5]). Par exemple, si une palette agit verticalement sur la barre alors qu’elle est dans l’alignement de l’hélicoptère elle ne va pas incliner le plan de rotation de la barre de Bell-Hiller vers l’avant ou l’arrière, mais à 90°, c'est-à-dire latéralement.

Photo 9 : tête de rotor principal d’un TREX 450
Pour un bon fonctionnement de la tête de rotor principal, il est important d’utiliser trois servos identiques, c'est-à-dire ayant le même débattement et le même temps de réponse, et ceci afin que le mixage électronique fonctionne parfaitement. On choisira de préférence des servos avec axe de palonnier sur roulement pour limiter les jeux fonctionnels.
On pourra éventuellement trouver des hélicoptères anciens n’utilisant pas la disposition des servos présentée. Les radios sont en principe prévues pour supporter tous ces types d’arrangement non conventionnels. Dans les premiers temps des hélicoptères RC on utilisait même des mixages mécaniques dans l’hélicoptère au lieu des mixages dans l’émetteur avec dans certains cas des servos se déplaçant en translation sur des chariots. Ceci permettait d’utiliser des radios sans mixage spécial hélicoptère, mais les jeux fonctionnels des mécaniques ont conduit à abandonner cette solution. Néanmoins, les micro-hélicoptères avec récepteur spécial intégré incluent une variante électronique de ces mixeurs coté réception. Ils ne nécessitent dons pas non plus d’émetteur avec mode hélicoptère, ce qui permet de se contenter d’émetteurs bas de gamme.
Contrôle de
l’axe de lacet
Le récepteur commande par une voie le gyroscope qui lui-même commande le servo d’anti-couple qui fait varier le pas des pales du rotor de queue. La photo 10 permet de voir le système de variation de pas via un renvoi d’angle à 90°. On entrevoit aussi la courroie de commande en rotation du rotor de queue.

Photo 10 : rotor d’anticouple HK 450
(HobbyKing)
Certains gyroscopes ont deux modes de fonctionnement :
· mode normal,
· mode conservateur de cap (heading hold en anglais).
En fait, ce qu’on appelle gyroscope en modélisme correspond en réalité à un gyromètre, c'est-à-dire un capteur qui mesure une vitesse de rotation. Le dispositif fonctionne donc naturellement en cherchant à annuler la vitesse de rotation selon l’axe de lacet sans chercher à maintenir un cap précis. Dans le mode « conservation de cap », une mémoire du microcontrôleur du gyroscope intègre en permanence la vitesse de rotation, ce qui permet d’obtenir et donc connaître le cap courant, et par conséquent d’asservir l’hélicoptère sur cette valeur. Il n’y a pas un mode meilleur que l’autre, il faut essayer les deux pour sentir la différence. Souvent on préfère le mode normal en translation car il facilite les virages coordonnés et le mode conservation de cap en stationnaire car il évite la dérive progressive du cap.
Comme le gyroscope est un asservissement, il demande un réglage précis du gain pour fonctionner correctement. Gain trop faible la correction est imparfaite, gain trop fort le système à tendance à osciller (sur-corriger). Le réglage du gain se fait souvent par des potentiomètres sur le gyroscope, réglés au tournevis une fois pour toutes. Mais les gyroscopes haut de gamme permettent en général le réglage du gain via la radiocommande grâce à une voie auxiliaire. Dans ce dernier cas, la voie auxiliaire sert aussi à basculer du mode normal au mode conservateur de cap.
Pour un meilleur fonctionnement, on aura intérêt à choisir un servo d’anti-couple aussi rapide que possible. D’ailleurs certains gyroscopes sont prévus pour fonctionner avec des servos numériques ultra-rapides spéciaux pour l’anti-couple qui minimisent le temps de réaction (voir chapitre « radiocommande »).
Il n’y a rien à monter pour les hélicoptères de débutant, sinon les piles dans l’émetteur et l’accumulateur dans l’hélicoptère. Dans le cas des hélicoptères plus conventionnels, il faut assembler les divers blocs. La photo 11 montre les principaux éléments tels qu’on les trouve dans une boîte de HK 450 (HobbyKing) ; il reste une à deux heures d’activité au tournevis. Dans certains cas toutefois, le fabricant fournit − répartis dans de multiples sachets − un ensemble conséquent de pièces individuelles ; il convient alors de s’armer de la notice, de patience et de bons outils.
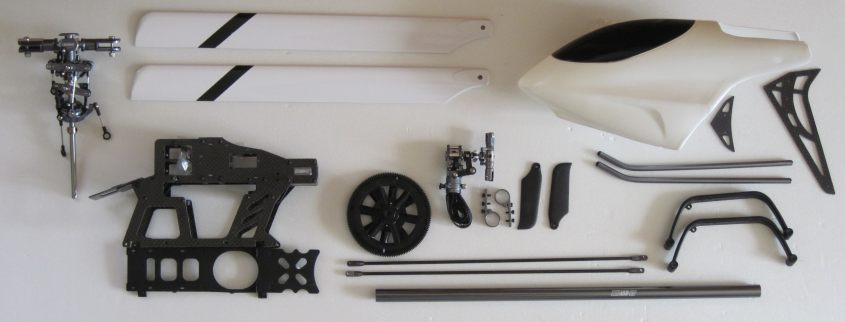
Photo 11 : éléments d’un kit HK450 tel que sortis de la boîte
Malgré la simplicité apparente, pour réussir un montage, il faut respecter un certain nombre de règles importantes :
· toutes les vis « métal » doivent être sécurisées par du frein-filet car les vibrations les font se desserrer petit à petit (une pale qui se détache peut faire très mal et a déjà fait perdre un œil à plus d’un).
· Toutes les chapes à rotule doivent être rodées si elles sont dures jusqu’à fonctionner à frottement doux.
· Les commandes et les axes en rotation doivent fonctionner avec un jeu fonctionnel de l’ordre du dixième de millimètre (sinon reprendre le montage).
· Toutes les vis doivent être serrées juste ce qu’il faut (trop serrées elles peuvent arracher le filetage en plastique ou en aluminium des pièces dans lesquelles elles sont montées). Il faut donc contrôler le couple de serrage qu’on applique à chaque vis et contrôler le serrage des éléments pré-montés.
· Les pales du rotor principal doivent impérativement être pesées et équilibrées si nécessaire.
· Le pied des pales doit éventuellement être poncé jusqu’à obtenir une rotation presque libre sans point dur pour limiter les vibrations.
· Le jeu des engrenages doit être vérifié (une épaisseur de papier à cigarettes). Il ne doit pas y avoir de point dur.
· La tension de la courroie de rotor d’anti-couple (si elle existe) doit être contrôlée, et même revérifiée régulièrement. Trop tendue la courroie s’endommage. Pas assez tendue elle risque de sauter.
· Toutes les pièces tournantes et glissantes doivent être lubrifiées dans leurs paliers et leurs guides avec un peu d’huile de vaseline (éviter les lubrifiants plus « sophistiqués » qui ont tendance à s’évaporer avec le temps).
Après l’assemblage mécanique il faut contrôler que les pales du rotor principal, comme celui de queue, ont été montées dans le sens prévu pour l’hélicoptère. Si c’est le cas il reste à vérifier que le moteur entraîne dans le bon sens. Dans le cas contraire, il faut permuter deux des fils moteur sur les trois. Il faut aussi vérifier que le rotor de queue tourne dans le bon sens s’il est entraîné par une courroie crantée car elle peut être mal montée (torsion à 90° dans le mauvais sens).
Certains kits fournissent des masselottes pour les barres de Bell-Hiller, et on peut souvent trouver des palettes de Hiller plus ou moins grandes que celle d’origine. Il y a donc un choix à faire dans ce domaine. Les masselottes augmentent la stabilité de l’hélicoptère, et des palettes plus grandes permettent de changer plus rapidement le plan de rotation de la barre stabilisatrice, ce qui rend l’hélicoptère plus réactif. Pour débuter on utilisera donc les masselottes et des petites palettes. Avec la progression on supprimera les masselottes et on choisira des palettes plus grandes. Attention : ne pas oublier après toute intervention sur la barre de Bell-Hiller, et après le premier montage, de vérifier son parfait centrage sur l’axe de rotation du rotor principal.
Réglage
Bien monter son hélicoptère est essentiel, mais pas suffisant. Il faut aussi le régler correctement.
Tout commence par un préréglage avant le premier vol. La longueur de chaque tringle doit préalablement être réglée sur sa longueur recommandée par le constructeur du kit en vissant plus ou moins les chapes à rotule. Ensuite, on règle la radiocommande avec des commandes de vol avec débattement symétrique (pas du rotor principal à 0° avec le manche de gaz au milieu) et on met tous les manches au neutre, y compris le manche de pas/gaz. On monte alors les palonniers des servos afin qu’ils soient en position neutre (horizontaux ou verticaux), puis on corrige les petits écarts inévitables au trim de l’émetteur. On ajuste ensuite toutes les longueurs de tringles afin que tout soit perpendiculaire, horizontal ou vertical en vérifiant que la commande de pas/gaz est toujours au centre. Les palettes de Hiller doivent dans ces conditions être parfaitement horizontales et les pales du rotor principal doivent avoir une incidence nulle (utiliser un incidencemètre). Le calage du rotor de queue doit lui être fixé au milieu de sa course (environ 5° d’incidence des pales). Si la notice de l’hélicoptère donne des indications particulières, suivre ces indications.
Une fois les préréglages réalisés, il faut vérifier les sens des débattements. Régler le sens des débattements des trois servos de la tête de rotor peut s’avérer laborieux à cause des mixages. Les radios qui permettent de régler le sens du débattement en aval des mixages simplifient ce travail. Les sens de correction du gyroscope doit aussi être réglé. Il faut donner une petite tape latérale sur la queue et vérifier que le gyroscope fait varier le pas du rotor de queue dans le sens qui aurait diminué l’effet de la tape si le rotor anti-couple avait été en rotation. C’est également le moment de vérifier le centrage et modifier les débattements à l’émetteur pour les adapter à son niveau de pilotage.
Les tests et réglages préliminaires achevés, on peut tester l’hélicoptère en stationnaire dans l’effet de sol (moins de 50 cm de hauteur au-dessus du sol). La première chose à faire est de régler les neutres des commandes selon les trois axes de rotation. Une fois ce premier réglage obtenu il convient d’affiner le réglage du pas du rotor de queue afin qu’il n’y ait pas de dérive de cap trop importante lorsque la commande de lacet est au neutre. Il faut maintenant régler le gain du gyroscope à la limite de l’oscillation (dans ses deux modes de fonctionnement si on les utilise tous les deux).
Un dernier réglage, le plus délicat, reste à réaliser. C’est le « tracking » : équilibrage du pas des deux pales du rotor principal. S’il est bon dès le départ on ne voit qu’un disque en rotation lorsque le rotor tourne. Dans le cas contraire on en voit deux superposés. Dans ce dernier cas il faut jouer sur la longueur de la tringle de commande d’une des deux pales jusqu’à ce que les deux disques se superposent. Il faut procéder par tâtonnements, sans jamais s’approcher trop près de l’hélicoptère ni mettre les yeux dans le plan des pales car il vaut mieux un réglage approximatif qu’un œil en moins !
Une fois tous les réglages effectués, il faut en général reprendre le réglage des neutres, car les différents réglages interfèrent entre eux. Si on est débutant, il ne reste plus qu’à apprendre à piloter, technique expliquée dans le chapitre sur le pilotage. Ce chapitre n’est pas rédigé au 17 octobre 2011, mais on trouve de nombreux sites internet qui donnent les indications nécessaires pour débuter l’apprentissage. Il y a aussi un ouvrage un peu ancien en anglais qui traite bien de l’apprentissage du pilotage [6].
1. Magasin internet de modélisme Speed-RC (site en français)
2. Magasin internet de modélisme autrichien Lindinger Modellbau (site en français, anglais et allemand)
3. Magasin internet de modélisme chinois (Hongkong) HobbyKing (site en anglais)
4. Christian Grüber, Willy Benoit, « Mécanique générale », 1998, Presses Polytechniques et Universitaires Romandes
5. R. Feynman, R. Leighton, M. Sands, « Le cours de physique de Feynman, mécanqiue 1 », 1999, éditions DUNOD
6.
Ray
Hostetler, « Ray’s authoritative helicopter manual », 2001, R/C
Modeler Corporation